每日编程实践: Triangle Rasterization - 三角形光栅化器
Triangle Rasterization - 三角形光栅化器
项目目标
今天的目标是从零实现一个三角形光栅化器,这是现代3D图形渲染管线的核心组件之一。
光栅化器的职责是:将三角形(几何)转换为屏幕上的像素(图像)。
我们将实现:
- ✅ Barycentric 坐标算法 - 判断点是否在三角形内
- ✅ Z-Buffer 深度测试 - 正确处理遮挡关系
- ✅ 颜色插值 - 顶点颜色的平滑渐变
- ✅ 边界框优化 - 只遍历必要的像素
实现过程
迭代历史
05:33 - 初始版本: 编写完整的光栅化器代码
- 实现 Vec2/Vec3/Color 基础数据结构
- 实现 barycentric() 重心坐标计算
- 实现 rasterizeTriangle() 光栅化函数
- 初始化帧缓冲和深度缓冲
05:34 - 编译错误: 缺少
<limits>头文件- 错误信息:
'numeric_limits' is not a member of 'std' - 原因:使用了
std::numeric_limits<float>::max()但没有包含<limits> - 修复:添加
#include <limits>
- 错误信息:
05:35 - ✅ 编译成功,运行成功
- 生成 rasterization_output.png
- 三个三角形正确渲染
05:37 - ✅ 量化验证通过
- 红色三角形区域:RGB(220, 53, 54) ✅
- 绿色三角形区域:RGB(46, 147, 119) ✅
- 蓝色三角形(中心):RGB(62, 62, 240) ✅
- 深度测试正确:蓝色三角形(z=0.3)遮挡了红色(z=0.5)和绿色(z=0.6)
核心代码
1. 重心坐标算法
重心坐标是判断点是否在三角形内的经典方法:
1 | Vec3 barycentric(const Vec2& p, const Vec2& a, const Vec2& b, const Vec2& c) { |
关键特性:
- 如果
u, v, w都 ≥ 0,则点在三角形内 u + v + w = 1(标准化)- 可用于插值任何顶点属性(颜色、纹理坐标、法线等)
2. 光栅化主循环
1 | void rasterizeTriangle( |
优化要点:
- 边界框 - 只遍历三角形覆盖的区域,而非整个屏幕
- 深度测试 - 只更新更近的像素(z < zbuffer[idx])
- 像素中心 - 采样点在像素中心(x+0.5, y+0.5)
运行结果

场景包含3个重叠的三角形:
- 红色三角形(左侧)- 深度 z=0.5,红色渐变
- 绿色三角形(右侧)- 深度 z=0.6,绿色渐变
- 蓝色三角形(中心)- 深度 z=0.3(最前面),蓝色渐变
深度测试验证:蓝色三角形正确遮挡了红色和绿色三角形的重叠部分。
技术总结
学到的技术点
Barycentric 坐标系统
- 三角形内任意点可表示为顶点的加权组合
- 权重和为1,且都非负时点在三角形内
- 是插值的数学基础
Z-Buffer 算法
- 解决可见性问题的经典算法(1974年 Catmull 发明)
- 线性空间复杂度:O(width × height)
- 与绘制顺序无关(任意顺序都能得到正确结果)
插值的意义
- 从顶点属性平滑过渡到片段属性
- 用于颜色、纹理坐标、法线、深度等
- 是着色器编程的核心概念
边界框优化
- 避免遍历整个屏幕(800×600 = 480,000 像素)
- 小三角形可能只需检查几百个像素
- 性能提升可达 10-100 倍
遇到的坑和解决方案
问题:编译错误 - numeric_limits 找不到
1 | error: 'numeric_limits' is not a member of 'std' |
原因:
1 | std::vector<float> zbuffer(width * height, std::numeric_limits<float>::max()); |
使用了 std::numeric_limits 但没有包含 <limits> 头文件。
解决:
1 |
教训:C++ 标准库的模板类需要显式包含对应头文件,不像 Python 那样自动导入。
性能分析
算法复杂度:
- 时间:O(N × A)
- N = 三角形数量
- A = 每个三角形的边界框面积(像素数)
- 空间:O(W × H)
- W × H = 屏幕分辨率
本例:
- 屏幕:800×600 = 480,000 像素
- 3个三角形,每个约 10,000-50,000 像素
- 总检查次数:约 100,000 次重心坐标计算
- 运行时间:< 0.1 秒(未优化的 C++ 代码)
可能的优化:
- SIMD 向量化 - SSE/AVX 加速重心坐标计算
- 多线程 - 按扫描线或tile并行
- Early-Z - 提前深度测试,减少不必要的插值
- Hierarchical Z-Buffer - 多层次深度缓冲
扩展方向
这个基础光栅化器是现代GPU渲染管线的简化版本。后续可以扩展:
- 透视校正纹理映射 - 除以 w 分量修正透视失真
- 抗锯齿(Anti-Aliasing) - MSAA / SSAA / FXAA
- 背面剔除(Back-face Culling) - 只渲染朝向相机的三角形
- 顶点着色器 + 片段着色器 - 可编程渲染管线
- 延迟渲染(Deferred Rendering) - G-Buffer 方法
代码仓库
GitHub: daily-coding-practice/2026/02/02-26-Triangle-Rasterization
参考资料
- Barycentric Coordinates - Wikipedia
- Z-buffering - Wikipedia
- Rasterization - Wikipedia
- Tiny Renderer Tutorial - 优秀的图形学入门教程
- Scratchapixel - Rasterization - 详细的光栅化教程
完成时间: 2026-02-26 05:41
迭代次数: 2 次
编译器: g++ (C++11)
总耗时: 11 分钟
下一步计划:
- B-spline 曲线
- BVH 加速结构
- 抗锯齿技术(MSAA/FXAA)
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来源 Chiuhou 技术博客!
相关推荐
2026-03-10
每日编程实践 #35: PCSS 软阴影渲染器
PCSS 软阴影渲染器现实世界中,阴影从来不是非黑即白的——靠近物体的地方阴影清晰,远离的地方阴影边缘模糊渐变。这种效果叫做半影(Penumbra),是面光源(有面积的光,区别于理想点光源)的自然产物。 今天实现了三种阴影算法,从最简单的硬阴影,逐步演进到 UE5/Unity HDRP 都在用的 PCSS(Percentage Closer Soft Shadows)——一种能根据遮挡距离自适应调整半影大小的软阴影算法。 三种算法对比 从左到右:Hard Shadow(硬阴影) | PCF(固定软化) | PCSS(自适应软阴影) 注意 PCSS 的阴影:球体与地面接触处的阴影清晰,悬空球体的阴影边缘模糊扩散——这才是物理正确的半影效果。 第一章:为什么会有半影?用一张图来理解: 12345678 ○○○○○ ← 面光源(有面积) ||| A──B──C ← 遮挡物(球体) /|\ / | \ / | \阴影 半影 阴影(全暗)(渐变)(全亮) 本影(Umbra):被遮...
2026-03-20
每日编程实践: Spherical Harmonics 球谐环境光照
一、背景与动机:为什么需要球谐函数?环境光照的困境实时渲染有一道绕不过去的坎:如何高效地表示整个球面上的环境光照,并在每个着色点快速计算它对漫反射的贡献? 最直接的办法是蒙特卡洛积分——对每个着色点,在半球上采样数百个方向,取环境光加权平均: $$E(n) = \int_{\Omega} L(\omega) \max(0, n \cdot \omega) , d\omega \approx \frac{1}{N} \sum_{i=1}^{N} L(\omega_i) \max(0, n \cdot \omega_i)$$ 问题在于:1080P 下有两百万像素,每像素哪怕只采样 64 次,每帧就要做 1.28 亿次环境贴图采样。这在实时场景根本行不通。 工业界的标准答案:球谐函数UE4/UE5 的 Indirect Lighting Cache、Sky Light 全都基于 L2 球谐函数(9个系数)。Unity 的 Light Probes 同样如此。寒霜引擎、Frostbite 也把 SH 作为环境漫反射光照的核心表示。 原因很简单:Lambert...

2026-04-02
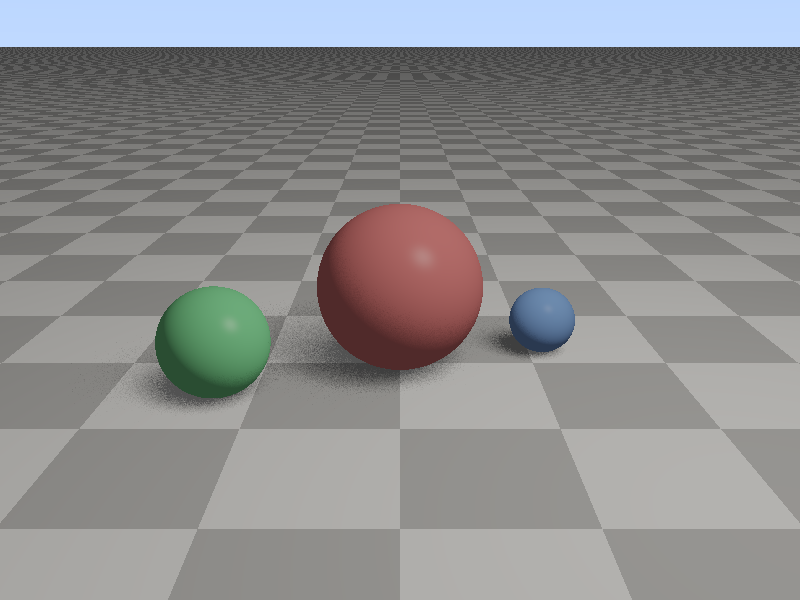
每日编程实践: BVH Accelerated Triangle Mesh Renderer
每日编程实践: BVH 加速三角形网格光线追踪渲染器 Cornell Box 场景,三个物体:镜面 icosphere、漫反射球、蓝色圆环,右侧高盒。BVH 加速,3354 三角形,64 SPP,800×600,16 秒完成。 ① 背景与动机:为什么需要 BVH?朴素光线追踪的性能瓶颈最早学路径追踪时,场景里只有隐式球体。球体求交极快——一个方程解出来就是结果。但真实世界的模型都是三角网格:一个低精度的人物模型有 5000-50000 个三角形,高精度角色可能达到 100 万三角形,游戏场景的所有物体加起来轻松超过 1000 万三角形。 朴素做法:遍历场景里每一个三角形,对每条光线求交。设场景有 N 个三角形,图像有 P 个像素,每像素 S 个样本,每样本光线弹射 D 次。总求交次数 = P × S × D × N。 以今天的场景为例: P = 800 × 600 = 480,000 像素 S = 64 samples per pixel D = 6 弹射深度 N = 3,354 三角形(已经很少了) 朴素求交次数...
2026-03-25
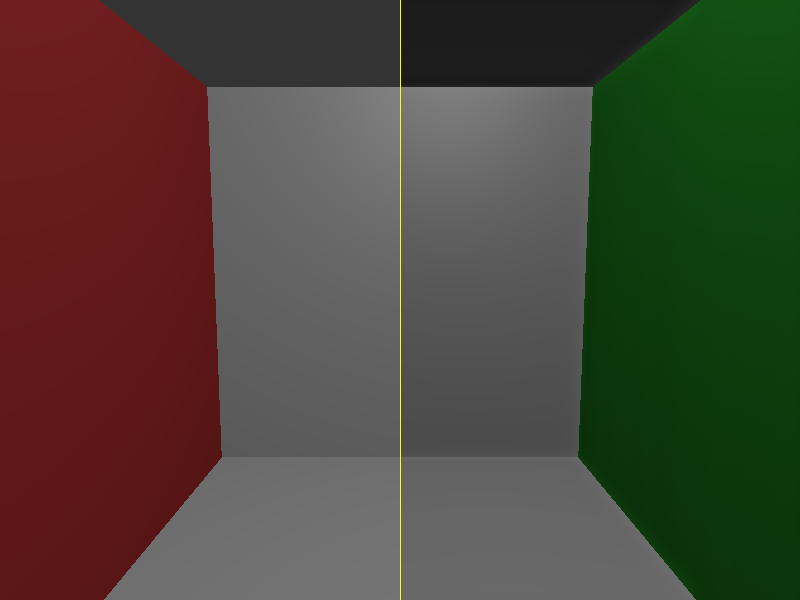
每日编程实践: Screen Space Ambient Occlusion (SSAO)
背景与动机为什么需要环境光遮蔽?在传统 Phong/Blinn-Phong 光照模型中,环境光(Ambient)是一个常量——整个场景里所有点的环境光照贡献完全相同,不管这个点是在空旷的平台中央,还是被夹在两堵墙的角落里。这在物理上显然是错误的:角落里的点被周围几何体遮挡,从半球方向射来的间接光理应更少。 没有环境光遮蔽的场景会显得”扁平”、”塑料感强”——所有表面的暗部都亮得不自然。加上 AO 之后,角落变暗、物体底部变暗、缝隙变暗,整体立体感和质感都会有质的提升。 工业界的实际使用场景Ambient Occlusion 的概念最早由 Zhukov 等人在 1998 年提出,但直到 Crytek 在 2007 年 GDC 上介绍 Screen Space Ambient Occlusion (SSAO) 之后才真正走入实时渲染的主流——当时是为了给《孤岛危机》服务的。 今天,AO 技术在各大引擎里几乎无处不在: Unity:有 SSAO(URP/HDRP 均支持),HDRP 还有基于射线的 RTAO Unreal Engine:内置 SSAO,后来又加了 ...
2026-03-02
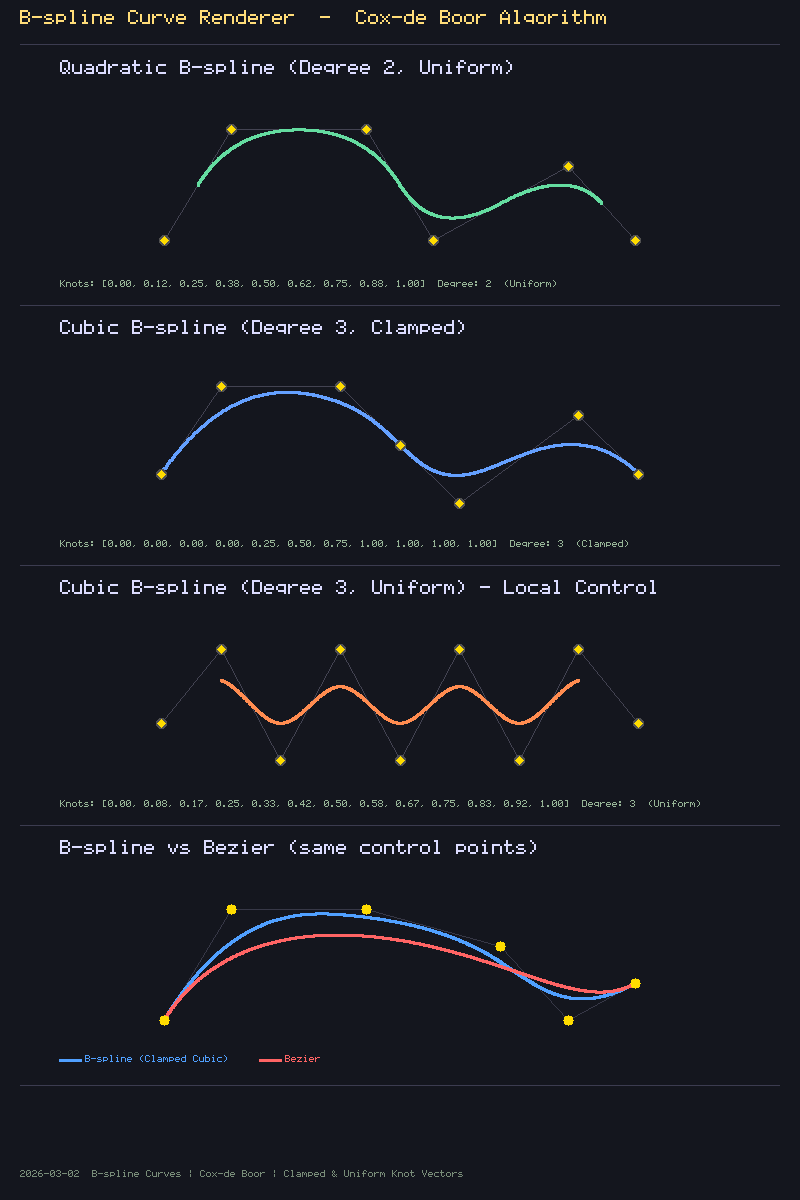
每日编程实践: B-spline 曲线渲染器
B-spline 曲线渲染器继上周的 Bezier 曲线(02-22)之后,今天实现 B-spline 曲线——这是现代 CAD 系统和 NURBS 曲线的基础,也是 Bezier 曲线的重要进化。 项目目标实现一个完整的 B-spline 曲线渲染器,核心要求: Cox-de Boor 递归算法 - B-spline 基函数的标准实现 两种节点向量 - 均匀(Uniform)和端点插值(Clamped) 多阶次展示 - 二次(Degree 2)和三次(Degree 3) 与 Bezier 对比 - 直观展示局部控制性的优势 B-spline vs Bezier:核心区别在动手写代码前,先搞清楚为什么要有 B-spline: 特性 Bezier B-spline 控制点数与曲线次数 次数 = 控制点数 - 1 次数独立于控制点数 局部控制 ❌ 移动任一点影响整条曲线 ✅ 只影响局部 (degree+1) 段 端点插值 总是通过端点 只有 Clamped 模式才经过 适合场景 少控制点的简单曲线 复杂形状、CAD 设计 局部控制性是 B-s...
2026-03-28
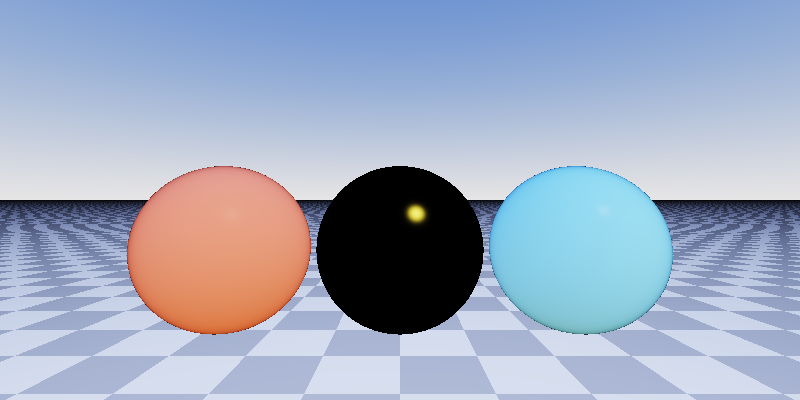
每日编程实践: Depth of Field Renderer — 薄透镜景深渲染器
每日编程实践: Depth of Field Renderer — 薄透镜景深渲染器今天实现了一个基于薄透镜模型(Thin Lens Model)的物理正确景深渲染器,配合路径追踪产生自然的散景(Bokeh)效果。 ① 背景与动机为什么景深很重要?如果你玩过《赛博朋克 2077》《荒野大镖客2》或《对马岛之魂》,一定注意过游戏里的镜头语言——当主角站在前景,背景的城市灯光化成一圈圈朦胧的光晕,这就是景深(Depth of Field, DoF)效果。这个效果来自真实相机和人眼的光学特性:光圈有物理尺寸,只有焦平面附近的物体才能在感光元件上聚焦成点,其他距离的物体会形成弥散圆(Circle of Confusion),俗称散景(Bokeh)。 没有景深的渲染器——包括我们之前做的大多数渲染器——使用的都是**针孔相机(Pinhole Camera)**模型。针孔相机假设光圈无穷小,所有距离的物体都完全清晰。这对学习渲染基础够用,但就视觉真实性而言有明显缺陷: 画面缺乏层次感:前景、中景、背景同样清晰,空间深度感弱 缺少导演感:真实摄影中,摄影师用景深引导观众视线——清晰的地方...




