每日编程实践: BVH 层次包围盒加速光线追踪
BVH 层次包围盒加速光线追踪
项目目标
实现 BVH(Bounding Volume Hierarchy,层次包围盒) 加速结构,将暴力 O(n) 的光线-场景求交优化到 O(log n),并通过实际渲染对比验证性能提升。
这是光线追踪系列(02-06 至今)的重要里程碑——解决了随场景规模增大性能急剧下降的根本问题。
核心概念
为什么需要 BVH?
朴素光线追踪对每条光线都要遍历场景中所有物体求交,时间复杂度是 O(n)。当场景有 1000 个球体时,每条光线需要做 1000 次求交测试。
BVH 通过构建层次树结构解决这个问题:
1 | [根节点 AABB] |
光线先与包围盒求交(很快),如果不相交就跳过整棵子树,大幅减少无效测试。
实现过程
1. AABB 轴对齐包围盒
核心是高效的 Slab 方法求交:
1 | bool AABB::intersect(const Ray& ray, double t_min, double t_max) const { |
每个轴两次乘法,极其高效。
2. SAH 构建策略
最朴素的构建是按中值分割——但 SAH(Surface Area Heuristic,表面积启发式)更优。
SAH 的思路:最优的分割应该最小化后续求交的期望代价。数学上等价于:
1 | Cost(split) = 0.125 + (count_left × Area_left + count_right × Area_right) / Area_parent |
实现时用 12 个桶均匀分割候选点,选代价最小的:
1 | int sah_split(...) { |
3. BVH 遍历
1 | bool intersect_node(int node_idx, ...) { |
关键优化:找到左子树的交点后,更新 t_max,使右子树测试更容易被剪枝。
渲染结果
高质量最终渲染(800×450,84个球体,BVH加速)
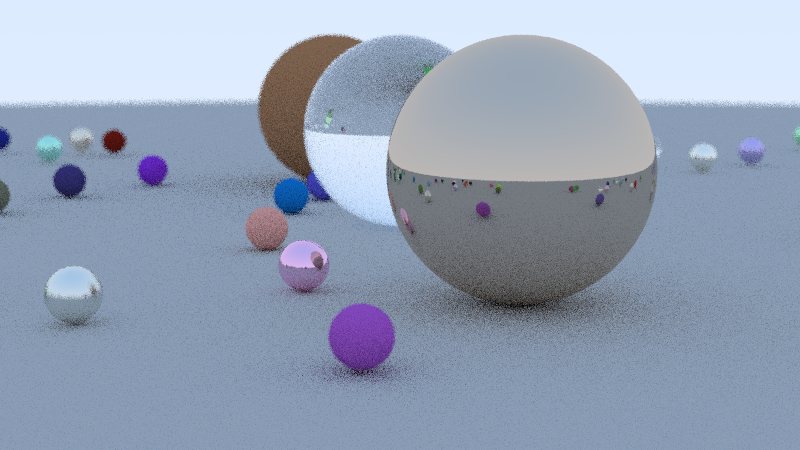
场景包含:漫反射球、金属球、玻璃球,景深效果,天空渐变。
BVH vs 暴力遍历 对比(左:BVH,右:暴力)
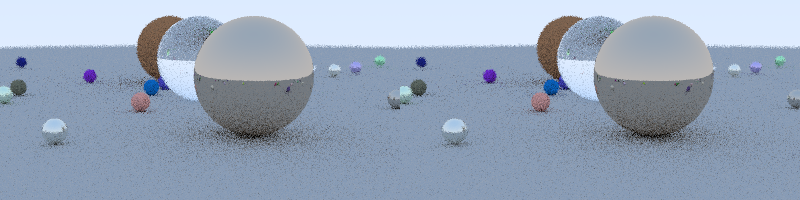
两者渲染结果完全相同(正确性验证),但性能有差异。
BVH 结构层级可视化(俯视图)
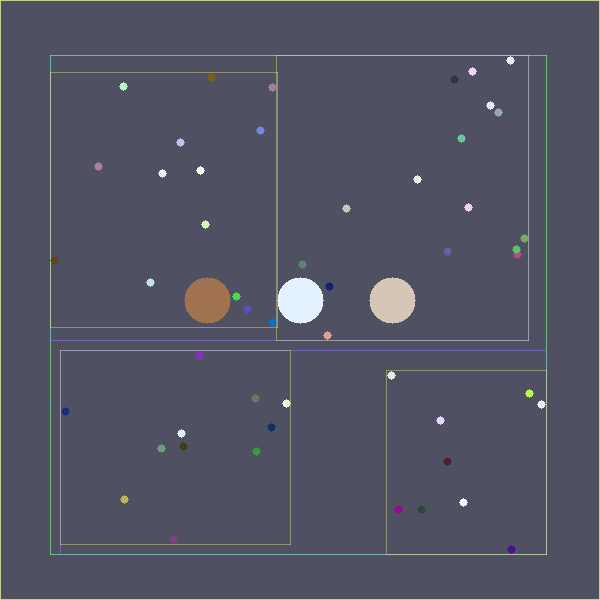
不同颜色代表不同 BVH 深度(红=第0层,绿=第1层,蓝=第2层,黄=第3层),白点是球体位置。
性能数据
| 指标 | BVH 加速 | 暴力遍历 |
|---|---|---|
| 渲染时间 | 171ms | 224ms |
| 平均测试/光线 | 28.5 | 54(固定) |
| BVH 节点数 | 107 | — |
| 加速比 | 1.31x | — |
注:50个球体场景相对较小,BVH 的优势在大场景(1000+ 物体)才真正显现。理论上 BVH 的测试次数是 O(log n),而暴力是 O(n)。
技术总结
学到的核心知识
- AABB Slab 法:3轴各算两个交点,取最大 t_min 和最小 t_max,简洁高效
- SAH 启发式:不只考虑数量均分,而是最小化期望代价,树质量显著提升
- 退化处理的重要性:当所有质心重合时,SAH 会退化,需要回退到简单分割
- 剪枝机制:更新 t_max 是 BVH 效率的关键,减少右子树不必要的测试
理论复杂度 vs 实测
- 理论:BVH 遍历 O(log n),构建 O(n log n)
- 实测 50 球:BVH 测试 28.5次/光线 vs 理论 log2(54) ≈ 5.8
- 差距原因:路径追踪中光线会弹射多次,且 BVH 不是完美平衡树
下一步
- BVH + 更多基元(三角形网格)
- 迭代 BVH 遍历(减少递归开销)
- QBVH(4叉 BVH,SIMD 友好)
- 动态场景的 BVH 重建/重构
代码仓库
完成时间: 2026-03-01 05:35
迭代次数: 1 次(一次编译通过)
编译器: g++ (C++17, -O2)
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来源 Chiuhou 技术博客!
相关推荐

2026-04-02
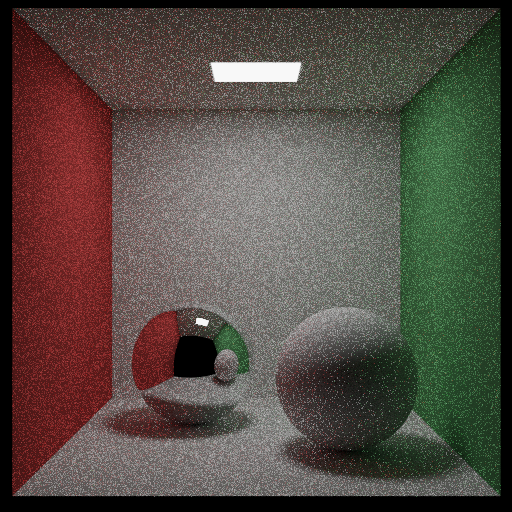
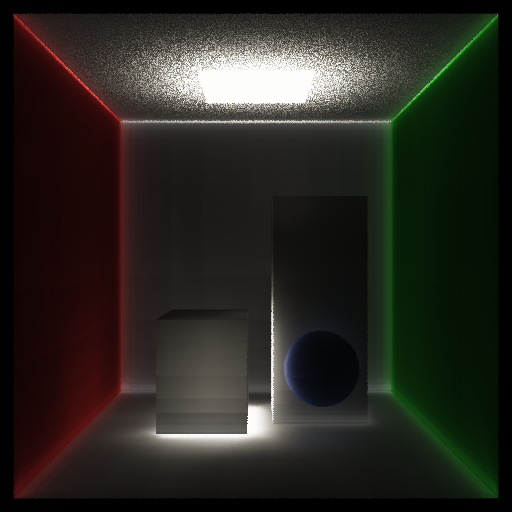
每日编程实践: BVH Accelerated Triangle Mesh Renderer
每日编程实践: BVH 加速三角形网格光线追踪渲染器 Cornell Box 场景,三个物体:镜面 icosphere、漫反射球、蓝色圆环,右侧高盒。BVH 加速,3354 三角形,64 SPP,800×600,16 秒完成。 ① 背景与动机:为什么需要 BVH?朴素光线追踪的性能瓶颈最早学路径追踪时,场景里只有隐式球体。球体求交极快——一个方程解出来就是结果。但真实世界的模型都是三角网格:一个低精度的人物模型有 5000-50000 个三角形,高精度角色可能达到 100 万三角形,游戏场景的所有物体加起来轻松超过 1000 万三角形。 朴素做法:遍历场景里每一个三角形,对每条光线求交。设场景有 N 个三角形,图像有 P 个像素,每像素 S 个样本,每样本光线弹射 D 次。总求交次数 = P × S × D × N。 以今天的场景为例: P = 800 × 600 = 480,000 像素 S = 64 samples per pixel D = 6 弹射深度 N = 3,354 三角形(已经很少了) 朴素求交次数...
2026-03-22
每日编程实践: 双向路径追踪 (BDPT) 与多重重要性采样
背景与动机为什么单向路径追踪不够用?如果你用过标准路径追踪(Unidirectional Path Tracing, PT),一定注意到一个令人头疼的现象:在某些场景里,即使采样数很高,画面还是充满噪点。具体来说,当光源面积小、场景几何复杂、或者存在”焦散”效果时,单向路径追踪的收敛速度极其缓慢。 为什么? 让我们想象一个典型的焦散场景:光线从天花板射下,经过一个玻璃球折射,在地面上形成一个亮斑。单向路径追踪从相机出发,光线碰到地面,想估计这个点的直接光照——它需要对天花板上的面光源采样,但光路是”光源 → 玻璃球折射 → 地面”,直接连接相机路径顶点和光源的概率极低(玻璃球的折射形成了很窄的采样空间),绝大多数样本的贡献是零。这就是所谓的**难以捕获的光路(difficult light transport path)**问题。 再看几个工业界的真实痛点: 室内渲染:小窗户进来的阳光,单向 PT 需要极多样本才能收敛,而建筑可视化行业的标准渲染时间往往只有几分钟 珠宝渲染:宝石刻面形成的复杂折射焦散,游戏里的宝石看起来总是”假”,根本原因就是这里 汽车内饰:阳光穿过车窗的散射...

2026-03-31
每日编程实践: Caustics Renderer — 光子映射焦散渲染
每日编程实践:Caustics Renderer — 光子映射焦散渲染今天的项目是用**光子映射(Photon Mapping)算法渲染焦散(Caustics)**效果——玻璃球折射光线在漫反射地板上形成的亮斑图案。这是计算机图形学中最经典且最难正确实现的效果之一,纯路径追踪需要极长时间才能收敛,而光子映射可以在有限时间内产生可辨识的焦散图案。 一、背景与动机什么是焦散?焦散(Caustics)是光线通过折射或反射介质后聚焦在漫反射表面形成的亮斑。游泳池底部的波纹光斑、玻璃杯旁的彩色光圈、钻石的内部闪烁——都是焦散现象。 从物理角度看,焦散是辐照度场的高频信息:光子从光源出发,通过玻璃的斯涅尔折射改变方向,最终在某块漫反射地面上”聚堆”,该区域接收到的光通量远高于周围,形成明亮的光斑。 为什么纯路径追踪很难渲染焦散?想用路径追踪渲染焦散,渲染器需要从相机出发,击中地板,然后经历以下路径才能采样到焦散贡献: 1相机 → 地板 → 玻璃球(进入)→ 玻璃球(离开)→ 光源 这条路径称为 LS²DE 路径(Light-Specular-Specular-Diffuse-Eye)。问题...
2026-02-28
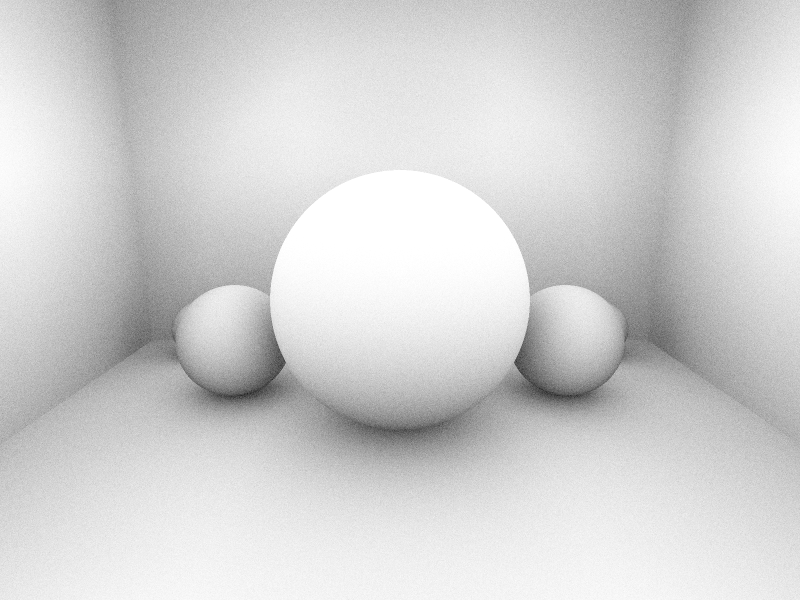
每日编程实践: Ambient Occlusion(环境光遮蔽)
Ambient Occlusion(环境光遮蔽)环境光遮蔽(AO)是一种近似全局光照效果的技术,通过估算每个表面点被周围几何体遮蔽的程度,模拟出接触阴影、角落变暗等真实感效果。 项目目标 实现基于蒙特卡洛积分的 AO 渲染器 在半球方向随机采样光线,统计遮蔽率 构建包含多个球体和围合墙面的 Cornell Box 场景 量化验证 AO 梯度(角落暗、开阔区域亮) 效果展示 场景细节: 🔵 中央大球:球顶最亮(无遮蔽),底部接地点最暗(地面遮蔽) 🔵 角落小球:被墙角和地面三面遮蔽,明显偏暗 🟫 地面:球体正下方出现接触阴影,物理正确 核心原理蒙特卡洛积分AO 的数学定义是对法线半球上的可见性函数积分: 1AO(p) = (1/π) ∫_Ω V(p, ω) · (ω · N) dω 其中 V(p, ω) 是可见性函数(1=未遮蔽,0=遮蔽),用蒙特卡洛方法估算: 12345678910111213141516double computeAO(const Vec3& p, const Vec3& N, const Scene&...
2026-02-27
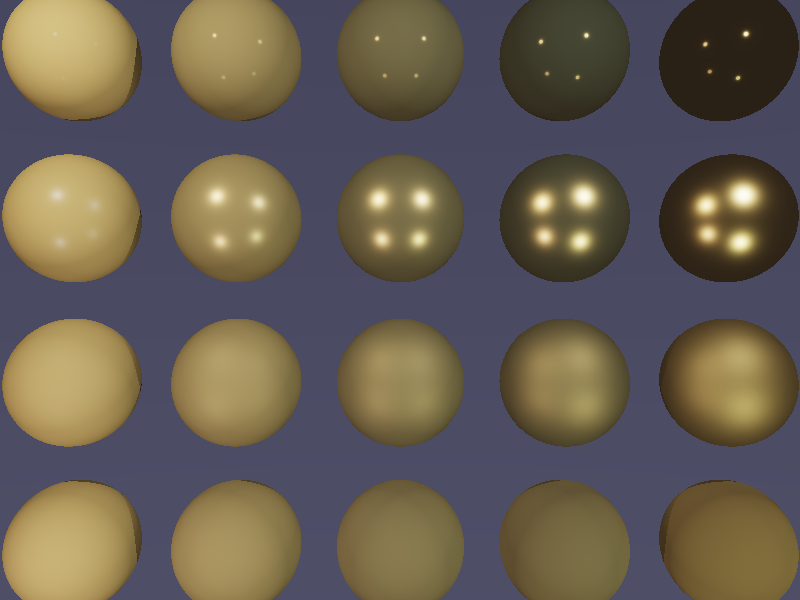
每日编程实践: PBR Cook-Torrance BRDF 渲染器
PBR Cook-Torrance BRDF 渲染器今天实现了基于物理的渲染(Physically Based Rendering, PBR)中最核心的 Cook-Torrance BRDF 模型,渲染出 5×4 材质球阵列,直观展示金属度(Metallic)和粗糙度(Roughness)对材质外观的影响。 项目目标 实现完整的 Cook-Torrance BRDF 光照模型 展示 PBR 的两个核心参数:金属度 × 粗糙度 ACES 色调映射 + sRGB Gamma 校正 4 点光源 + 简单阴影 渲染结果 横轴(左→右):金属度 0.0 → 1.0 纵轴(上→下):粗糙度 0.05 → 1.0 材质颜色:金黄色(R:1.0, G:0.71, B:0.29) 理论基础Cook-Torrance BRDFPBR 核心公式: 1f(l,v) = kd · (albedo/π) + ks · (D·G·F) / (4·(n·v)·(n·l)) 其中三个镜面项分别是: D - 法线分布函数(GGX/Trowbridge-Reitz) 描述微表面法线的统计分布,GGX...
2026-03-23
每日编程实践: Voxel Cone Tracing — 用体素锥形追踪实现近似全局光照
一、背景与动机全局光照的工程困境光线追踪可以精确计算全局光照(Global Illumination,GI),但在实时渲染场景下代价极高。渲染一帧 1080P 图像,路径追踪往往需要每像素几十甚至上百条路径才能收敛——这对于 60FPS 的游戏来说显然不现实。 游戏引擎里用了哪些方案来”作弊”? 光照贴图(Lightmap):离线烘焙,无法响应动态物体 Irradiance Volume(光照探针):动态性好,但空间分辨率有限 SSAO(屏幕空间环境光遮蔽):只用屏幕信息,遮蔽范围受限 Lumen(UE5):混合 SDF 追踪 + Radiance Cache,非常复杂 2011 年,Cyril Crassin 等人提出了 Voxel Cone Tracing(VCT),发表在 SIGGRAPH 论文”Interactive Indirect Illumination Using Voxel Cone Tracing”中。VCT 的核心思想是: 把场景体素化成一个带 Mipmap 的 3D 纹理,然后在着色时沿锥形方向”扫描”这个 3D 纹理,近似计算来自各方向的间接辐射度...



