前言:一个奇怪的问题 如果有人给你一个数学公式,比如:
$$f(x, y, z) = \sqrt{x^2 + y^2 + z^2} - 1$$
你能在 3D 空间里把它”画”出来吗?
答案是可以的。$f(x,y,z) = 0$ 的所有点,恰好就是一个半径为 1 的球面。这种”由方程定义的曲面”叫做等值面(Isosurface) 。
问题是 :计算机显卡只会画三角形,不会直接画”方程”。我们需要一个算法,把等值面转换成三角形 。
这就是 Marching Cubes (行进立方体)的工作。
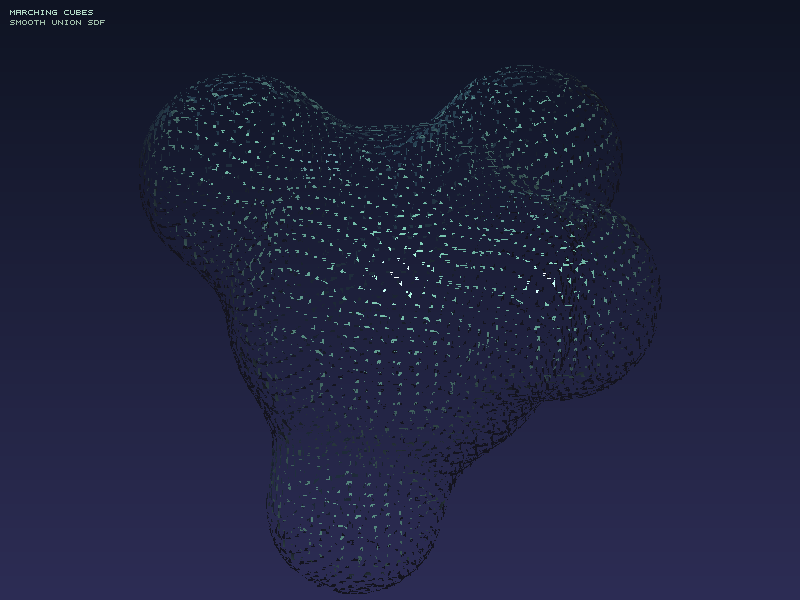
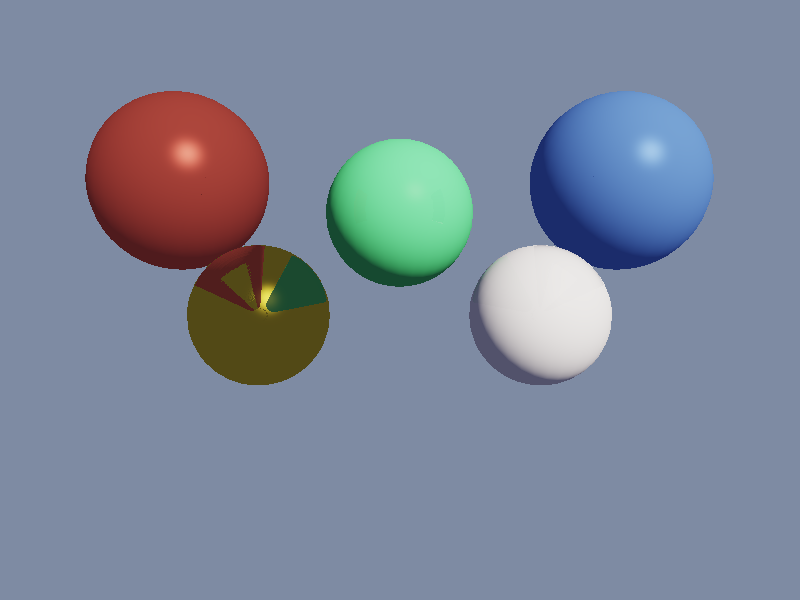
今天我们从零实现这个算法,得到下面这张图:
这是 5 个球用”平滑融合”连接在一起的有机形状,由 15,196 个三角形 组成,生成耗时 0.078 秒 。
一、等值面是什么?用 SDF 定义三维形状 隐式表示 vs 显式表示 3D 形状有两种定义方式:
显式 :直接列出表面上的点(三角网格、点云)。隐式 :用一个函数 $f(x,y,z)$ 描述空间中每个点和形状的关系。
隐式表示里最常用的是 SDF(Signed Distance Field,有符号距离场) :
$f(x,y,z) < 0$:点在形状内部
$f(x,y,z) = 0$:点在形状表面 (这就是等值面)
$f(x,y,z) > 0$:点在形状外部
球的 SDF 最简单——就是点到球心的距离减去半径:
1 2 3 4 5 6 7 8 9 10 float sdSphere (Vec3 p, Vec3 center, float radius) float dx = p.x - center.x; float dy = p.y - center.y; float dz = p.z - center.z; return sqrtf (dx*dx + dy*dy + dz*dz) - radius; }
直觉 :SDF 告诉你”你离最近的表面有多远,以及你在内部还是外部”。
平滑并集(Smooth Union) 多个球可以融合在一起,形成有机形状。普通的并集(取最小值)会产生硬边缘:
1 2 float d = min (sdSphere (p, center1, r1), sdSphere (p, center2, r2));
Smooth Union(平滑并集) 在交界处增加平滑过渡:
1 2 3 4 5 6 7 float smoothMin (float a, float b, float k) float h = std::max (k - std::abs (a - b), 0.0f ) / k; return std::min (a, b) - h * h * k * 0.25f ; }
参数 k 控制过渡区域的大小:
k = 0:等同于硬并集,没有过渡k = 0.5:0.5 单位范围内平滑融合(本项目使用的值)k = 2.0:很大的融合区域,形状变得很”黏”
把 5 个球融合在一起:
1 2 3 4 5 6 7 8 float scalarField (Vec3 p) float d = sdSphere (p, {0 , 0 , 0 }, 1.2f ); d = smoothMin (d, sdSphere (p, { 1.4f , 0.5f , 0 }, 0.7f ), 0.5f ); d = smoothMin (d, sdSphere (p, {-1.4f , 0.5f , 0 }, 0.7f ), 0.5f ); d = smoothMin (d, sdSphere (p, {0 , -1.4f , 0.5f }, 0.6f ), 0.5f ); d = smoothMin (d, sdSphere (p, {0 , 0.5f ,-1.4f }, 0.65f ),0.5f ); return d; }
这个函数就是我们的”标量场”——Marching Cubes 接下来要把它变成三角形。
二、Marching Cubes 核心算法 大思路:把空间切成小方块 Marching Cubes 的核心想法:把 3D 空间划分成很多小立方体(体素),逐个处理每个体素 。
对于每个体素,看它的 8 个角点 ,判断每个角点是在等值面内部还是外部:
1 2 3 4 5 6 7 8 9 10 体素的 8 个角: 7──────6 /| /| / | / | z 4──────5 | ↑ | 3── | ─2 | | / | / +──→ x |/ |/ / 0──────1 y↗
对每个角点:
如果 scalarField(角点) < 0(在等值面内部)→ 标记为 1
如果 scalarField(角点) >= 0(在等值面外部)→ 标记为 0
8 个角点,每个 0 或 1,总共有 $2^8 = 256$ 种可能的组合。
关键洞察:256 种情况 每种 256 种组合,等值面穿过这个体素的方式是不同的。但有规律可循:
比如:
全是 0(都在外部)→ 等值面不经过这个体素
全是 1(都在内部)→ 等值面不经过这个体素
角 0 是 1,其余是 0 → 等值面在角 0 附近切一个小三角形
Lorensen & Cline(1987)的论文预先计算出了所有 256 种情况的三角形方案,存成一个查找表:
1 2 3 4 5 6 7 8 9 static const int triTable[256 ][16 ] = { {-1 ,...}, {0 , 8 , 3 , -1 ,...}, {0 , 1 , 9 , -1 ,...}, };
每行的数字是”边索引”——三角形的顶点在哪条边上(等值面和体素的边的交点)。
代码实现:逐体素处理 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 for (int iz = 0 ; iz < gridRes-1 ; iz++) {for (int iy = 0 ; iy < gridRes-1 ; iy++) {for (int ix = 0 ; ix < gridRes-1 ; ix++) { float values[8 ]; Vec3 corners[8 ]; for (int k = 0 ; k < 8 ; k++) { int cx = ix + cornerOffset[k][0 ]; int cy = iy + cornerOffset[k][1 ]; int cz = iz + cornerOffset[k][2 ]; corners[k] = gridOrigin + Vec3 (cx, cy, cz) * voxelSize; values[k] = grid[cx][cy][cz]; } int cubeIndex = 0 ; for (int k = 0 ; k < 8 ; k++) { if (values[k] < 0.0f ) { cubeIndex |= (1 << k); } } const int * tris = triTable[cubeIndex]; for (int t = 0 ; tris[t] != -1 ; t += 3 ) { Triangle tri; for (int v = 0 ; v < 3 ; v++) { int edgeIdx = tris[t + v]; int v0 = edgeVertices[edgeIdx][0 ]; int v1 = edgeVertices[edgeIdx][1 ]; tri.v[v] = interpolate (corners[v0], corners[v1], values[v0], values[v1]); } triangles.push_back (tri); } }}}
精确找交点:线性插值 等值面(value = 0)和体素某条边的交点,通过线性插值求得:
1 2 3 角点A(value=-0.8,在内部) 角点B(value=0.4,在外部) A●─────────────────────●B ↑等值面在这里
交点在 A 向 B 走 t 的位置,其中:
$$t = \frac{0 - v_A}{v_B - v_A} = \frac{-(-0.8)}{0.4 - (-0.8)} = \frac{0.8}{1.2} \approx 0.667$$
1 2 3 4 5 6 7 8 9 10 11 12 13 14 Vec3 interpolate (Vec3 p0, Vec3 p1, float v0, float v1) { if (std::abs (v1 - v0) < 1e-6f ) return (p0 + p1) * 0.5f ; float t = -v0 / (v1 - v0); return { p0. x + t * (p1. x - p0. x), p0. y + t * (p1. y - p0. y), p0. z + t * (p1. z - p0. z) }; }
这确保了三角形的顶点精确地落在等值面上(标量值 = 0 的地方),而不是随意放在体素边的中点。
三、计算法线:数值梯度 有了三角形顶点,还需要法线 才能做光照计算。
法线垂直于等值面,恰好就是标量场的梯度方向 :
$$\vec{n} = \nabla f = \left(\frac{\partial f}{\partial x}, \frac{\partial f}{\partial y}, \frac{\partial f}{\partial z}\right)$$
SDF 的梯度等于”指向外部的方向”——这正是法线!
在代码里用中心差分 数值近似梯度:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 Vec3 computeNormal (Vec3 p) { const float eps = 0.001f ; float dx = scalarField ({p.x + eps, p.y, p.z}) - scalarField ({p.x - eps, p.y, p.z}); float dy = scalarField ({p.x, p.y + eps, p.z}) - scalarField ({p.x, p.y - eps, p.z}); float dz = scalarField ({p.x, p.y, p.z + eps}) - scalarField ({p.x, p.y, p.z - eps}); return Vec3 (dx, dy, dz).normalized (); }
为什么用中心差分而不是前向差分?
中心差分(两边各取一点)精度更高(二阶精度),前向差分(只往一边走)精度低(一阶精度)。每次多调用一次 scalarField,但法线更准确。
在 Marching Cubes 里,法线计算这样集成:
1 2 3 4 5 6 7 8 9 Vec3 cornerNormals[8 ]; for (int k = 0 ; k < 8 ; k++) { cornerNormals[k] = computeNormal (corners[k]); } tri.n[v] = interpolate_normal (cornerNormals[v0], cornerNormals[v1], t); tri.n[v] = tri.n[v].normalized ();
这样每个三角形顶点有自己的法线,Phong 着色时可以在三角形面内插值法线,得到平滑的光照效果(而不是每个三角形面都是同一个颜色)。
四、正交投影和光栅化 有了三角形网格,接下来把它渲染成 2D 图像。
正交投影 我们用正交投影 (也叫平行投影),而不是透视投影。区别:
透视投影 :近大远小,模拟真实摄像机,适合游戏画面正交投影 :物体大小不随距离变化,适合技术展示、工程图纸
1 2 3 4 5 透视投影: 正交投影: ↓ 近 ↓ 所有光线平行 大物体 相同大小 ↓ 远 小物体
代码:
1 2 3 4 5 6 7 8 9 10 11 12 13 bool project (Vec3 p, float & sx, float & sy, float & depth) Vec3 rel = p - camPos; float x = rel.dot (camRight); float y = rel.dot (camUp); float z = rel.dot (camFwd); sx = (x / orthoWidth + 0.5f ) * W; sy = (0.5f - y / orthoHeight) * H; depth = z; return true ; }
Z-Buffer:解决遮挡 多个三角形重叠时,近的应该遮住远的。Z-Buffer 为每个像素记录”当前最近的三角形的深度”:
1 2 3 4 5 6 7 8 9 10 std::vector<float > zbuffer (W * H, 1e30f ) ;float z = w0*depth[0 ] + w1*depth[1 ] + w2*depth[2 ]; int pidx = y * W + x;if (z >= zbuffer[pidx]) continue ; zbuffer[pidx] = z;
重心坐标:判断像素是否在三角形内 对屏幕上的每个像素,需要判断它是否在当前三角形内。用重心坐标 :
对于点 $P$,如果 $P = w_0 \cdot A + w_1 \cdot B + w_2 \cdot C$,其中 $w_0 + w_1 + w_2 = 1$,那么:
$w_0, w_1, w_2$ 全都 $\geq 0$:点在三角形内
有任何一个 $< 0$:点在三角形外
重心坐标还有另一个用途:插值三角形内部的属性 (法线、颜色等)。
1 2 3 4 5 6 7 8 9 10 11 12 float area = (sx[1 ]-sx[0 ])*(sy[2 ]-sy[0 ]) - (sx[2 ]-sx[0 ])*(sy[1 ]-sy[0 ]);float w0 = ((sx[1 ]-sx[2 ])*(py-sy[2 ]) + (sy[2 ]-sy[1 ])*(px-sx[2 ])) / area;float w1 = ((sx[2 ]-sx[0 ])*(py-sy[0 ]) + (sy[0 ]-sy[2 ])*(px-sx[0 ])) / area;float w2 = 1.0f - w0 - w1;if (w0 < 0 || w1 < 0 || w2 < 0 ) continue ; Vec3 N = tri.n[0 ]*w0 + tri.n[1 ]*w1 + tri.n[2 ]*w2; N = N.normalized ();
五、Phong 光照 有了每个像素的法线,就可以计算光照颜色。用经典的 Phong 光照模型 :
$$\text{颜色} = \text{环境光} + \text{漫反射} + \text{高光}$$
1 2 3 环境光(Ambient):均匀的基础亮度,避免完全黑暗的暗面 漫反射(Diffuse):取决于法线和光线的角度(正对光源最亮) 高光(Specular):镜面反射,产生亮点
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 Vec3 shade (Vec3 pos, Vec3 normal, Vec3 baseColor) { Vec3 ambient = {0.08f , 0.08f , 0.12f }; auto computeLight = [&](Vec3 lightPos, Vec3 lightColor, float intensity) { Vec3 L = (lightPos - pos).normalized (); Vec3 V = (camPos - pos).normalized (); Vec3 H = (L + V).normalized (); float diff = max (0.0f , normal.dot (L)); float spec = pow (max (0.0f , normal.dot (H)), 64.0f ); return (baseColor * diff + lightColor * spec * 0.6f ) * intensity; }; Vec3 light1 = computeLight ({3.0f , 5.0f , 4.0f }, {1.0f , 0.95f , 0.9f }, 1.0f ); Vec3 light2 = computeLight ({-4.0f , 2.0f , -2.0f }, {0.5f , 0.6f , 0.8f }, 0.4f ); return ambient + light1 + light2; }
为什么用半角向量 H 而不是反射向量 R? reflect 函数),而且在大角度时有更好的表现。
六、完整渲染流程 把上面所有模块串在一起:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 1. 构建标量场 → scalarField(p) = smoothUnion(5个球的SDF) 2. 网格采样(64×64×64 = 262,144 个体素) → 每个角点采样 scalarField 和法线 3. Marching Cubes → 逐体素 → 查 triTable → 线性插值交点 → 生成三角形 4. 软件渲染 → 正交投影 → 重心坐标光栅化 → Z-Buffer → Phong 着色 5. 输出 PNG → 自制 zlib + PNG 编码(无第三方依赖)
运行结果:
三角形数:15,196
网格分辨率:64×64×64
总耗时:0.078 秒
七、自制 PNG 输出 这个项目没有用任何第三方库,连 PNG 输出都是自己写的。简单讲讲原理:
PNG 文件格式 = 文件头 + IHDR块(图像信息)+ IDAT块(压缩像素数据)+ IEND块
像素数据用 zlib/deflate 压缩。我们用最简单的”存储块”(不压缩,只打包):
1 2 3 4 5 6 7 out.push_back (is_last ? 0x01 : 0x00 ); out.push_back (block_len & 0xFF ); out.push_back (block_len >> 8 ); out.push_back (~block_len & 0xFF ); out.push_back (~block_len >> 8 );
还需要 CRC32(块校验)和 Adler-32(整体校验),代码里都有完整实现。
八、参数和调优
参数
当前值
调大效果
调小效果
网格分辨率
64
更多三角形,更平滑
更快但有锯齿
smoothMin k
0.5
融合过渡更大
趋近硬并集
等值面阈值
0.0
形状缩小
形状变大
中心差分 eps
0.001
法线误差大
太小会数值不稳定
九、完整代码 编译运行 :
1 2 3 g++ -O2 -std=c++17 main.cpp -o marching_cubes ./marching_cubes
总结 Marching Cubes 把一个”数学函数定义的形状”变成三角网格,核心步骤:
划分体素 :把空间切成小方块判断角点内外 :8 个角各是 0 或 1查表 :8 位索引 → 256 种情况 → 预定义的三角形方案插值交点 :等值面在边上的精确位置计算法线 :数值梯度,中心差分
配合 Smooth Union SDF,可以生成有机融合的形状——游戏里的地形、角色体积建模、医学影像的 CT 重建,都是 Marching Cubes 的实际应用场景。
参考资料