每日编程实践: Cloth Simulation 布料模拟
Cloth Simulation — 布料模拟
一件衬衫被风吹起的样子,一块丝绸落在桌面上的纹理,游戏里的旗帜随风飘动——这些看似简单的视觉效果,背后隐藏着一个有趣的物理问题:如何用计算机模拟柔软的织物?
今天实现了经典的质点弹簧布料模拟,这是游戏引擎和影视特效中处理布料最常见的基础方案。
最终效果
主渲染图(含风力的最终状态)
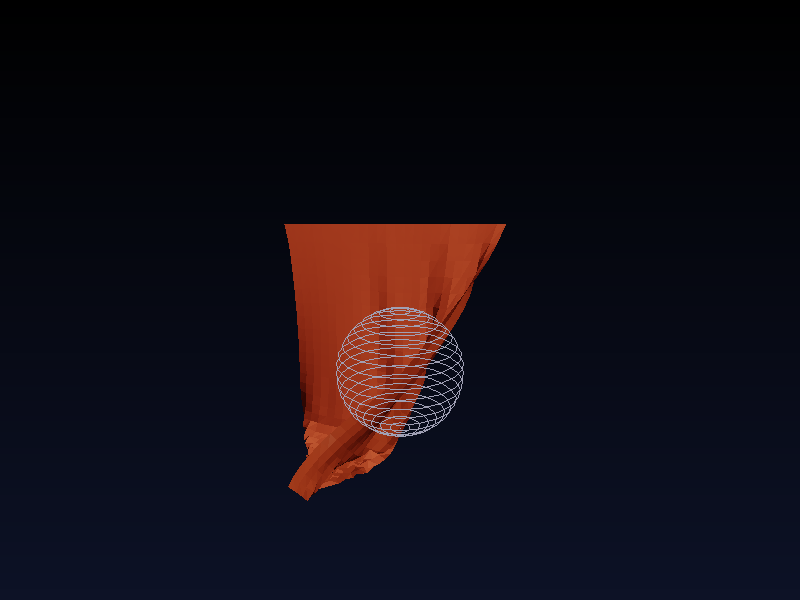
红色布料从水平展开的初始状态,在重力拉扯下垂落,包裹住下方的球体,随后被侧风吹起一角。Phong 着色区分正面(深红)和背面(暗红),形成明显的布料折叠感。
物理演化序列(0 → 150 → 300 → 600 帧)

从左上到右下:布料从展开状态,逐渐在重力作用下垂落,绕过球体弯曲,最终稳定在平衡态。
第一章:为什么布料模拟难?
布料的本质是大量纤维交织的网。真正从纤维层面模拟是不现实的——一件 T 恤大概有几十亿根纤维。
工程上的解法是离散化:把布料简化成有限个质点,再用弹簧连接它们,让弹簧产生的弹力近似真实布料的弹性。这就是 Mass-Spring System(质点弹簧系统)。
直觉模型:想象一个渔网。每个网结是一个质点(有质量,能运动),绳子是弹簧(被拉伸时产生回弹力)。把渔网竖起来,重力拉着每个结往下走,弹簧弹力阻止它们走得太远,最终网会挂成一个自然的弧形。
这套方案的优点是简单、可控;缺点是参数多(弹簧刚度、阻尼、步长),调不好会”数值爆炸”(弹簧力越来越大,最终粒子飞出去)。
第二章:质点网格与三类弹簧
布料被离散为 25×25 的质点网格(625个质点),质点之间通过三类弹簧连接。
为什么需要三类弹簧?
只用一类弹簧(比如只连接横纵邻居)的话,布料会出现一个严重问题:过度剪切——布料沿对角线方向几乎没有阻力,会像橡皮泥一样被拉成菱形,完全失去织物的感觉。
| 弹簧类型 | 连接方式 | 刚度 | 物理含义 |
|---|---|---|---|
| 结构弹簧 | 横向/纵向邻居(间距1) | 800 N/m | 抵抗拉伸,保持整体形状 |
| 剪切弹簧 | 对角线邻居(间距√2) | 400 N/m | 抵抗剪切变形,防止”菱形塌陷” |
| 弯曲弹簧 | 跨一个质点(间距2) | 200 N/m | 抵抗弯曲,模拟布料的刚度 |
1 | // 结构弹簧:横向和纵向直接相邻的质点 |
刚度比例 4:2:1 的直觉:结构弹簧最硬(布料不容易被拉长),剪切次之(可以有一定形变),弯曲最软(布料可以弯折)。这个比例是经典配置,来自实践经验。
第三章:弹簧力计算——胡克定律
每根弹簧按照胡克定律产生力:拉伸越多,力越大;压缩越多,反方向力越大。
$$F = k \cdot (|r| - L_0) \cdot \hat{r}$$
其中:
- $k$ 是弹簧刚度(越大越硬)
- $|r| - L_0$ 是形变量(当前长度 - 原始静止长度)
- $\hat{r}$ 是从 A 指向 B 的单位方向向量
1 | void step(double dt, bool apply_wind) { |
一个关键细节:顶边一行的质点标记为 pinned=true,模拟被夹住悬挂的效果。固定点不参与力的计算和位置更新,只是充当”锚点”。
第四章:Verlet 积分——稳定的时间推进
有了合力,下一步是更新每个质点的速度和位置。最直觉的方法是欧拉积分:
$$\mathbf{v}_{t+dt} = \mathbf{v}t + \mathbf{a} \cdot dt$$
$$\mathbf{x}{t+dt} = \mathbf{x}t + \mathbf{v}{t+dt} \cdot dt$$
但欧拉积分在布料模拟中有个大问题:能量不守恒。它会不断地向系统注入微小的能量,导致弹簧越震越猛,最终爆炸。
Verlet 积分的解法很巧妙——不显式存储速度,而是从当前位置和上一帧位置的差推算速度:
$$\mathbf{v}_t \approx \frac{\mathbf{x}t - \mathbf{x}{t-dt}}{dt}$$
$$\mathbf{x}_{t+dt} = \mathbf{x}_t + (\mathbf{x}t - \mathbf{x}{t-dt}) \cdot \text{damping} + \mathbf{a} \cdot dt^2$$
1 | // Verlet 积分 |
阻尼系数 0.99 的作用:每帧让速度乘以 0.99,相当于有微小的空气阻力。没有阻尼,布料会永远震荡不停;阻尼太大(比如 0.9)则布料运动过于迟缓。0.99 是让布料”自然减速”的经验值。
Verlet 的优点:
- 数值更稳定(时间复杂度 O(N))
- 不需要单独存储速度向量(省内存)
- 阻尼直接乘在速度项上,实现简洁
第五章:球体碰撞检测
布料落下时会遇到球体,需要防止质点穿入球体内部。
碰撞检测:法线推出法(Normal Pushout)
原理非常简单:检查质点是否在球体内部,如果是,就沿着球心到质点的方向,把质点推到球面外:
1 | // 球体碰撞处理 |
为什么不修改 prev_pos? 因为 Verlet 积分中,速度由 pos - prev_pos 决定。如果同时修改 prev_pos,质点的隐式速度会变成零(完全粘住)。只修改 pos 的话,质点在球面上有切向速度,可以自然地沿球面滑动——这正是我们想要的效果。
第六章:渲染——从物理到像素
自制软光栅化器
本项目没有使用 OpenGL,完全用 CPU 自制光栅化:
投影:将 3D 坐标通过透视投影变换到屏幕坐标:
1 | std::array<double, 3> project(const Vec3& p) const { |
Z-Buffer:记录每个像素已渲染的最近深度,只更新更近的片元:
1 | bool test(int x, int y, double z) { |
双面渲染 + Phong 着色
布料是双面的——正面和背面颜色不同。通过法线与视线方向的点积来判断:
1 | Vec3 n = edge1.cross(edge2).normalized(); // 面法线 |
Phong 光照模型:环境光 + 漫反射 + 高光:
1 | Vec3 phong(const Vec3& pos, const Vec3& normal, ...) { |
ACES 色调映射
最后通过 ACES 曲线把 HDR 线性颜色压缩到 [0,1] 范围,避免过曝:
1 | Vec3 aces(Vec3 c) { |
第七章:物理参数与稳定性
关键参数
1 | const int ROWS = 25, COLS = 25; // 质点网格大小 |
数值稳定性:弹簧刚度与步长的约束
一个经验法则:要保持 Verlet 积分稳定,需要满足:
$$k \cdot dt^2 < m$$
代入我们的参数:$800 \times 0.008^2 = 0.0512 < 1.0$(每个质点质量为 1.0 kg),满足条件。
如果把 struct_k 提高到 8000,或者把 dt 增大到 0.08,系统就会不稳定——弹簧力在每步内推动质点超过弹簧原长,然后下一步又更大的力推回来,振幅越来越大,最终”爆炸”。
模拟阶段
1 | 阶段1(600步,无风):布料在重力下自然垂落,包裹球体 |
量化验证结果
1 | 粒子最低点 y = -2.500(到达地面限制 ✅) |
第八章:进阶方向
本实现的局限
- 无摩擦约束:质点在球面滑动时没有摩擦力,布料会滑落
- 无撕裂:弹簧永远不会断裂(真实布料会撕破)
- 自碰撞缺失:布料折叠时不会检测布料与自身的碰撞,会穿插
- Verlet 精度:对于大变形或快速运动,精度不如 Runge-Kutta 4(RK4)
工业级方案
- PBD(Position-Based Dynamics):Nvidia FleX 和 Unreal Engine 的布料引擎都用 PBD,通过位置约束而非力约束来保证稳定性,允许更大的时间步长
- FEM(有限元法):精度最高,用于影视特效(如 Pixar 的布料模拟),但计算量大
- 自碰撞:通常用 BVH 加速碰撞对检测,复杂度从 O(N²) 降至 O(N log N)
小结
今天的布料模拟核心流程:
- 离散化:把连续布料拆成质点网格
- 三类弹簧:结构 + 剪切 + 弯曲,各有分工
- Verlet 积分:隐式速度 + 阻尼,比欧拉更稳定
- 碰撞处理:法线推出法,简单有效
- 渲染:透视投影 + Z-Buffer + Phong 着色 + ACES
最难的不是写代码,而是调参——弹簧刚度、时间步长、阻尼系数之间的关系需要满足稳定性条件,同时又要有足够的物理真实感。
完成时间: 2026-03-08 05:38
代码行数: ~620 行 C++
编译器: g++ 12.3.1 -std=c++17 -O2
运行时间: 0.077秒
代码仓库: https://github.com/chiuhoukazusa/daily-coding-practice/tree/main/2026/03/03-08-cloth-simulation