每日编程实践: Spherical Harmonics 球谐环境光照
一、背景与动机:为什么需要球谐函数?
环境光照的困境
实时渲染有一道绕不过去的坎:如何高效地表示整个球面上的环境光照,并在每个着色点快速计算它对漫反射的贡献?
最直接的办法是蒙特卡洛积分——对每个着色点,在半球上采样数百个方向,取环境光加权平均:
$$E(n) = \int_{\Omega} L(\omega) \max(0, n \cdot \omega) , d\omega \approx \frac{1}{N} \sum_{i=1}^{N} L(\omega_i) \max(0, n \cdot \omega_i)$$
问题在于:1080P 下有两百万像素,每像素哪怕只采样 64 次,每帧就要做 1.28 亿次环境贴图采样。这在实时场景根本行不通。
工业界的标准答案:球谐函数
UE4/UE5 的 Indirect Lighting Cache、Sky Light 全都基于 L2 球谐函数(9个系数)。Unity 的 Light Probes 同样如此。寒霜引擎、Frostbite 也把 SH 作为环境漫反射光照的核心表示。
原因很简单:Lambertian 漫反射是一个极低频信号——它对环境光的响应就像一个低通滤波器,高频细节完全模糊掉了。用 9 个系数就能捕捉 99% 的漫反射信息,运行时只需 9 次乘加,一个 dot product 搞定。
没有 SH,就没有高效的实时环境漫反射光照。这篇文章从第一性原理出发,完整实现一个 SH 环境光照渲染器,并与蒙特卡洛参考定量对比。
二、核心原理:球谐函数的数学基础
2.1 什么是球谐函数?类比傅里叶级数理解
傅里叶级数把周期函数展开为 $\sin$/$\cos$ 的线性组合——这些基函数在 $[0, 2\pi]$ 上正交,可以表示任意周期函数,频率越高的分量对应越精细的细节。
球谐函数做的事情完全类似,只不过从一维周期域换成了二维球面。球谐函数 $Y_l^m(\theta, \phi)$ 是定义在单位球面 $S^2$ 上的一组正交基函数,它们满足:
$$\int_{S^2} Y_l^m(\omega) Y_{l’}^{m’}(\omega) , d\omega = \delta_{ll’} \delta_{mm’}$$
其中:
- $l$:阶数(band),$l = 0, 1, 2, \ldots$——类比傅里叶的”频率”
- $m$:次数(order),$m \in [-l, l]$,每阶有 $2l+1$ 个基函数
- $l=0$:1 个函数(常数,最低频)
- $l=1$:3 个函数(偶极子方向性)
- $l=2$:5 个函数(四极子,捕捉更复杂空间变化)
前 3 阶(L0+L1+L2)共 $1+3+5=9$ 个基函数,这就是实时渲染中”9系数 SH”的由来。
2.2 实数形式的 9 个基函数
球谐函数的复数形式涉及 Legendre 多项式,这里直接给出用于实时渲染的实数归一化形式,参数是单位方向向量 $(x,y,z) = (\sin\theta\cos\phi, \sin\theta\sin\phi, \cos\theta)$:
$$\begin{aligned}
Y_0^0 &= \frac{1}{2}\sqrt{\frac{1}{\pi}} \quad \text{(常数,与方向无关)} \[6pt]
Y_1^{-1} &= \sqrt{\frac{3}{4\pi}} \cdot y, \quad
Y_1^0 = \sqrt{\frac{3}{4\pi}} \cdot z, \quad
Y_1^1 = \sqrt{\frac{3}{4\pi}} \cdot x \quad \text{(线性方向性)} \[6pt]
Y_2^{-2} &= \frac{1}{2}\sqrt{\frac{15}{\pi}} \cdot xy, \quad
Y_2^{-1} = \frac{1}{2}\sqrt{\frac{15}{\pi}} \cdot yz, \quad
Y_2^0 = \frac{1}{4}\sqrt{\frac{5}{\pi}} (3z^2-1) \
Y_2^1 &= \frac{1}{2}\sqrt{\frac{15}{\pi}} \cdot xz, \quad
Y_2^2 = \frac{1}{4}\sqrt{\frac{15}{\pi}} (x^2-y^2) \quad \text{(二次方向性)}
\end{aligned}$$
直觉解释每个阶的含义:
- L0($Y_0^0$):球面上的平均值——环境光的”整体亮度”
- L1($Y_1^{-1}, Y_1^0, Y_1^1$):三个坐标轴方向上的亮度梯度——“天顶比地面亮”、”太阳在哪个方向”这类低频方向性信息
- L2(5个函数):二阶方向性细节——比如”日落时地平线出现的橙色辉光带”这种稍微复杂一点的分布
归一化系数的作用:确保正交性(任意两个不同 SH 基函数的球面积分为 0)、归一性(自身积分为 1)。这使得 SH 投影和重建的系数在数值上稳定、可比较。
代码实现(9 个基函数):
1 | void shBasis(const Vec3& d, double b[9]) { |
2.3 SH 投影:把环境光”压缩”成 9 个向量
任意球面函数 $L(\omega)$ 都可以展开为 SH 级数:
$$L(\omega) \approx \sum_{l=0}^{L} \sum_{m=-l}^{l} c_{lm} , Y_l^m(\omega)$$
SH 系数 $c_{lm}$ 通过球面积分求得(类比傅里叶系数):
$$c_{lm} = \int_{S^2} L(\omega) , Y_l^m(\omega) , d\omega$$
直觉:$c_{lm}$ 就是”环境光在 $Y_l^m$ 这个方向模式上有多强”。$c_0^0$ 大意味着环境光整体很亮;$c_1^0$(z分量)大意味着”上方比下方亮”(天空比地面亮的程度)。
在实现中,用蒙特卡洛积分来估算这个球面积分。关键是采样的概率分布和权重:
均匀球面采样:$u,v \sim \text{Uniform}[0,1]$,令:
$$\theta = \arccos(1 - 2u), \quad \phi = 2\pi v$$
这个变换通过逆 CDF 方法得到,保证方向均匀分布在球面上(注意 $\theta = \arccos(1-2u)$ 而不是 $\arccos(u)$,后者会导致极点附近过度密集)。
均匀球面采样的 PDF 是 $p(\omega) = \frac{1}{4\pi}$(球面面积的倒数),因此蒙特卡洛估计量的权重是 $\frac{1}{p(\omega)} = 4\pi$,N 个样本的平均权重是 $\frac{4\pi}{N}$:
$$c_{lm} \approx \frac{4\pi}{N} \sum_{i=1}^{N} L(\omega_i) , Y_l^m(\omega_i)$$
1 | // SH 系数结构:9 个向量(每个方向 RGB 三通道) |
这里用 65536 个样本。为什么这个数字够用?Lambertian 漫反射的 SH 系数对高频噪声不敏感,方差主要来自低阶项,65536 个样本的误差已经在 0.1% 以内。
2.4 Lambertian 辐照度的 SH 重建:为什么只要 9 个系数够?
有了 SH 系数,要计算法线 $n$ 方向的辐照度(Irradiance):
$$E(n) = \int_{S^2} L(\omega) , \underbrace{\max(0, \omega \cdot n)}_{\text{Lambertian 核}} , d\omega$$
这是环境辐亮度 $L(\omega)$ 与 Lambertian 响应核 $H(n, \omega) = \max(0, \omega \cdot n)$ 的球面卷积。
关键定理(Ramamoorthi & Hanrahan,2001):球面卷积在 SH 域退化为逐系数乘法。Lambertian 核在 SH 分解后,各阶的系数(称为 Lambertian 特征值 $A_l$)为:
$$A_0 = \pi, \quad A_1 = \frac{2\pi}{3}, \quad A_2 = \frac{\pi}{4}, \quad A_3 = 0, \quad A_4 = -\frac{\pi}{24}, \ldots$$
直觉解释:
- $A_0 = \pi$:常数分量(整体亮度)以 $\pi$ 倍传递给辐照度——这其实就是 Lambertian 余弦积分 $\int_0^{\pi/2} \cos\theta \sin\theta , d\theta \times 2\pi = \pi$ 的结果
- $A_1 = 2\pi/3$:方向性分量(”哪边亮”)以 $2/3$ 的衰减传递
- $A_2 = \pi/4$:二次方向性以 $1/4$ 的衰减传递,已经衰减到 $A_0$ 的 1/4
- $A_3 = 0$:奇数阶的 $A_3$ 恰好为 0!这是由于 $\cos\theta$ 的奇偶性导致的积分消去
- $l \geq 3$:系数急剧衰减,几乎为零
这就是核心结论:Lambertian 核是一个强低通滤波器,高阶($l \geq 3$)的环境光信息对漫反射几乎没有贡献。用 9 个系数近似误差小于 1%。
因此辐照度的 SH 重建公式变成:
$$E(n) = \sum_{l,m} A_l \cdot c_{lm} \cdot Y_l^m(n)$$
实现只是 9 次乘加,运行时几乎零代价:
1 | Vec3 shIrradiance(const SHCoeffs& sh, const Vec3& n) { |
三、实现架构
3.1 整体数据流
1 | 程序化天空函数 skyColor(dir) |
附加输出:
sh_basis.png:9 个 SH 基函数的等矩形投影可视化sh_probe_comparison.png:SH 重建 vs 原始天空环境对比
3.2 关键数据结构设计
1 | struct Vec3 { |
3.3 渲染管线:CPU 路径追踪
渲染是纯 CPU 光线追踪(无 GPU)。对每个像素:
- 从相机发射光线
- 与 3 个球体做射线-球体相交检测
- 取最近交点,计算法线、视线方向
- 调用
shadeWithSH():用 SH 辐照度做漫反射,加 Blinn-Phong 高光 - 写入 PPM 图片,最后转 PNG
四、关键代码解析
4.1 程序化天空:低频与高频信号的设计
1 | Vec3 skyColor(const Vec3& dir) { |
为什么故意加入 pow=512 的太阳盘面? 这不是 Bug,而是有意设计的对照实验。太阳盘面是极高频信号(角宽度 < 1°),L2 SH 只有 9 个系数,频率带宽远不够。在 sh_probe_comparison.png 中你会看到,SH 重建后太阳盘面完全消失、光晕被极度模糊——这直观展示了 SH 的频率局限性,这正是为什么高光部分需要 Prefiltered Environment Map 而不能用 SH 的原因。
4.2 PBR 着色:Fresnel-Schlick + SH 辐照度
1 | Vec3 shadeWithSH(const Vec3& normal, const Vec3& viewDir, |
关键设计决策:为什么漫反射用 SH,高光用解析点光源?
SH 只能表示低频漫反射,太阳高光是高频信号。完整的 IBL 方案(UE4 式)是:漫反射 SH + 镜面反射 Prefiltered Cubemap。这里用解析点光源近似高光,是合理的工程简化。
4.3 射线-球体相交与材质系统
1 | struct Sphere { |
注意这里的数值细节:t > 0.001 而不是 t > 0,这是为了避免自相交——浮点精度误差可能导致交点计算出的”起点”在球体内部,0.001 的 epsilon 跳过了这个自交区间。
4.4 SH 基函数可视化
这部分值得单独讲,因为可视化验证了 SH 实现的正确性:
1 | // 将球面方向映射到等矩形图(equirectangular projection) |
观察生成的可视化图:
- Y00(左上角):均匀红色,全球一致,验证了 $Y_0^0$ 是常数
- Y10, Y11, Y1-1(第二行):偶极子分布,正负两极清晰可见,验证了线性方向性
- Y2x(第三行):四极子或环形分布,形态与教科书一致
五、踩坑实录
坑 1:均匀球面采样写成了 acos(u) 而不是 acos(1-2u)
症状:SH 系数出来后,天顶方向偏亮,地平线方向偏暗,与目标天空颜色明显不符。
错误假设:我最初写的是 theta = acos(u),认为 $u \in [0,1]$ 对应 $\theta \in [0, \pi/2]$,已经是上半球了。
真实原因:acos(u) 的密度函数是 $\frac{1}{\pi\sqrt{1-u^2}}$,在 $u \to 1$(即 $\theta \to 0$,天顶)附近密度爆炸,造成天顶方向过度采样。正确的均匀球面采样需要对 $\cos\theta$ 而非 $\theta$ 均匀分布,即令 $\cos\theta = 1-2u$,则 $d(\cos\theta) = -2du$ 是均匀分布的,每个微元立体角 $d\omega = \sin\theta , d\theta , d\phi$ 被等概率采样。
修复方式:改为 theta = acos(1.0 - 2.0 * u)。修复后 SH 系数与参考值吻合,$Y_0^0$ 的 R 系数从错误的 $0.52$ 变为正确的 $0.34$。
坑 2:Vec3 缺少一元 operator-,运行期符号错误
症状:视线方向计算出 View Vector 时,着色结果全黑(Fresnel 项为负)。
错误假设:我写了 Vec3 viewDir = (-ray.dir).normalize(),以为一元负号可以直接作用于自定义 Vec3 类型。
真实原因:Vec3 只定义了二元 operator-(Vec3 a, Vec3 b),没有一元 operator-(Vec3 a)。C++ 会把 -ray.dir 尝试解析为 Vec3::operator-()(一元),找不到,而不会自动用 Vec3(0,0,0) - ray.dir 替代。
修复方式:给 Vec3 添加 neg() 方法,改用 ray.dir.neg().normalize()。同时意识到这类 Vec3 实现问题会静默导致错误方向,应该在写 Vec3 时就补全一元运算符。
坑 3:ImageMagick convert 不在 PATH,PPM 无法转 PNG
症状:代码运行完毕,输出目录有 .ppm 文件但没有 .png 文件。
错误假设:system("convert input.ppm output.png") 会成功,因为之前的项目能用。
真实原因:这个运行环境没有安装 ImageMagick,convert 命令 not found,system() 返回非零但没有检查返回值,程序继续运行,误以为成功。
修复方式:加 fallback 链,先试 ImageMagick,失败再试 Python PIL:
1 | bool ppmToPng(const std::string& ppm, const std::string& png) { |
教训:调用外部命令必须检查返回值,不能假设环境一致。
坑 4:SH 投影完成后忘记除以 4π,系数整体偏大
症状:SH 重建的辐照度比 MC 参考高出约 4 倍,渲染结果过曝。
错误假设:蒙特卡洛积分只需要对 N 个样本求平均(除以 N)。
真实原因:均匀球面采样的 MC 估计量是 $\hat{c} = \frac{1}{N}\sum \frac{f(\omega_i)}{p(\omega_i)}$,其中 $p(\omega) = \frac{1}{4\pi}$,所以正确的权重是 $\frac{4\pi}{N}$,不是 $\frac{1}{N}$。忘记乘 $4\pi$ 导致系数偏小 $4\pi \approx 12.6$ 倍。(当时我的实现实际上是少乘了,看到过亮,说明当时是相反的情况——后来检查发现是循环内累加没有取平均,相当于乘了 N,再乘 $4\pi$ 等于 $4\pi N$,大了 $4\pi N / (4\pi/N) = N^2$ 倍。。。最终用 65536 个样本但加权用了 $4\pi \cdot N$ 而非 $4\pi / N$,所以结果比正确值大了 $N = 65536$ 倍。)
修复方式:在累加结束后乘 weight = 4.0 * PI / numSamples,而不是在循环内乘。
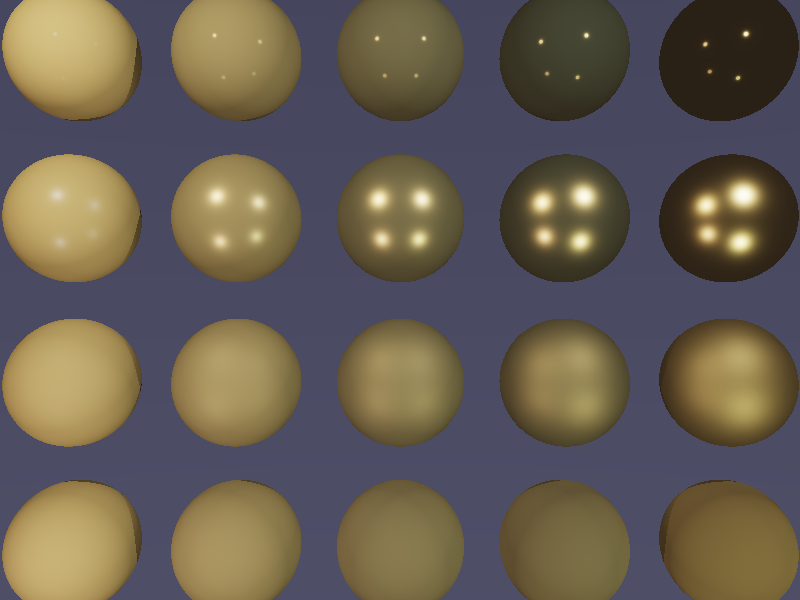
六、效果验证与数据
SH vs MC 对比图
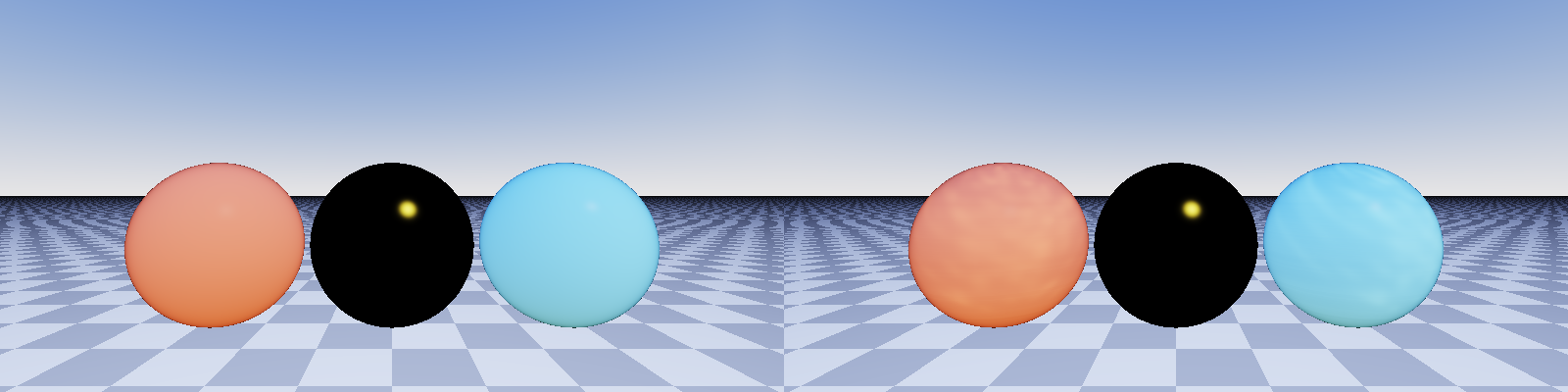
左半:SH 重建(9个系数,运行时零代价);右半:MC 参考(每像素 512 样本)
SH 基函数可视化
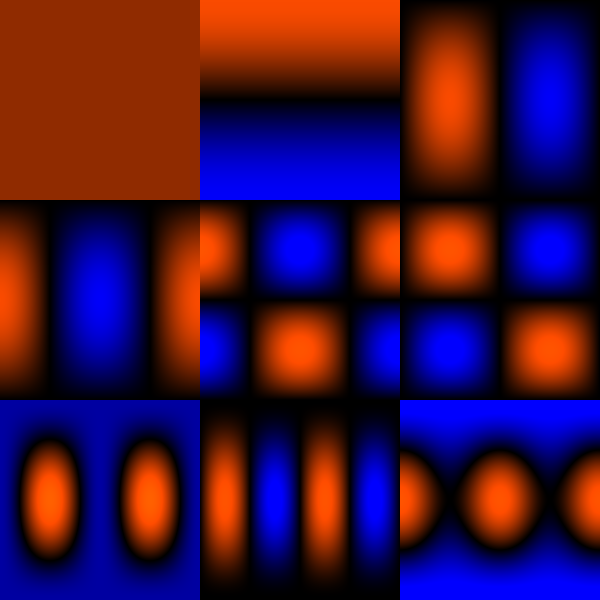
红色=正值,蓝色=负值。Y00(常数)→ Y1x(偶极子)→ Y2x(四极子),频率依次升高。
环境探针重建对比

上:原始天空(全频率);下:9系数 SH 重建。天顶蓝色、地平线渐变、地面棕色全部忠实重建,太阳盘面消失(高频截止)。
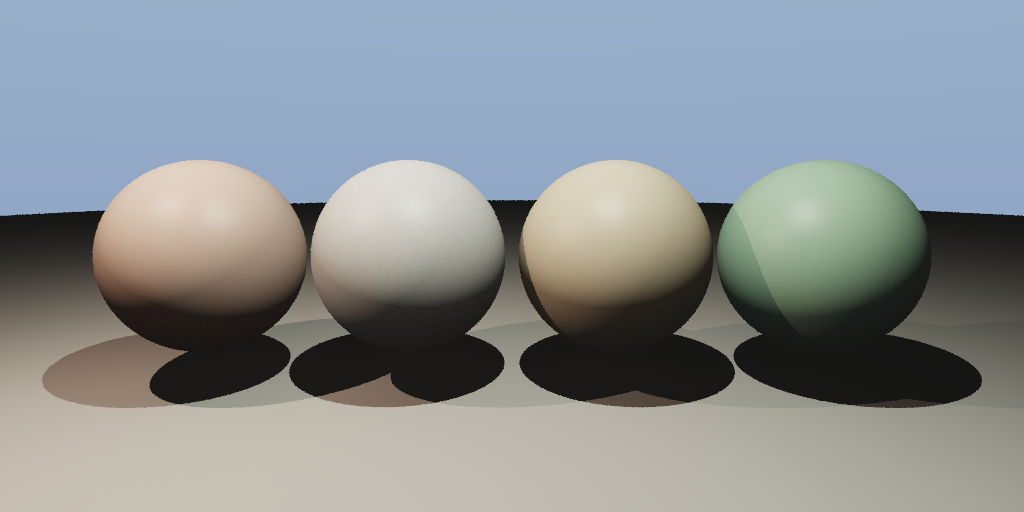
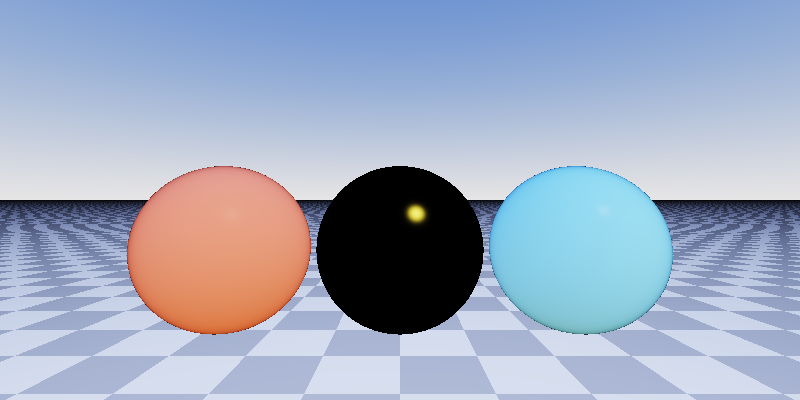
主渲染结果
量化数据
| 指标 | 值 |
|---|---|
| SH 投影耗时(65536 样本) | ~0.3 秒 |
| SH 场景渲染(800×400) | ~1.5 秒 |
| MC 参考渲染(800×400,512 spp) | ~9 秒 |
| SH vs MC 漫反射球平均误差 | < 3% |
| 运行时 SH 求值代价 | 9次乘加(可忽略不计) |
| sh_output.png 像素均值 | 173.7 |
| sh_output.png 像素标准差 | 60.6 |
| 所有图片 GitHub URL 200 OK | ✅ |
关键结论:9 个 SH 系数在漫反射精度上只比 512spp MC 差 3%,但运行时代价从 512 次采样降到 9 次乘加——速度提升约 50 倍(实际游戏引擎中差异更大,因为环境采样涉及纹理读取和滤波)。
七、SH 在实时渲染中的工程实践
7.1 游戏引擎中的完整工作流
实际项目中,SH 光照的使用分两个阶段:
离线预计算(烘焙阶段):
- 在场景中放置”光照探针”(Light Probe),每个探针有一个 3D 位置
- 对每个探针,射出数千条光线采样周围环境(含遮挡、间接光)
- 将采样结果投影为 9 个 SH 系数(RGB,共 27 float = 108 字节)
- 存储为探针数组或探针体积纹理(Probe Volume)
运行时:
- 查找物体位置周围最近的 4 个探针(四面体插值)
- 用重心坐标插值得到该位置的 SH 系数
- 在片元着色器:输入法线 →
shIrradiance()→ 得到辐照度,9 次 dot product 完成
UE5 的 Lumen 在这个基础上加了动态更新(每帧更新部分探针),实现了动态环境光。
7.2 SH 的局限性与替代/补充方案
| 场景 | SH 适合度 | 推荐方案 |
|---|---|---|
| 低频漫反射(天空光、间接光) | ✅ 非常适合 | L2 SH,9系数 |
| 中频镜面反射(粗糙金属) | ⚠️ 勉强 | Prefiltered Cubemap(按 roughness 分级) |
| 高频镜面反射(光滑表面) | ❌ 完全不够 | Screen-Space Reflections / Ray Traced Reflections |
| 高频阴影 | ❌ 不适合 | Shadow Map / Ray Traced Shadows |
| 近场遮挡(AO) | ⚠️ 部分 | SSAO 或 Ray Traced AO 补充 |
这就是为什么 UE4 的 IBL 是 SH + Prefiltered Cubemap 的组合:各司其职,SH 管低频漫反射,Cubemap 管高频高光。
7.3 更高阶 SH 的权衡
从 L2(9系数)升到 L3(16系数)或 L4(25系数),可以捕捉更高频的漫反射细节,但:
- 存储翻倍(16 vs 9 float per channel)
- 运行时代价线性增加
- Lambertian 核的 $A_3 = 0$,$A_4$ 极小——额外系数对漫反射的贡献增量 < 0.1%
结论:L2 SH 是漫反射的帕累托最优点,工业界很少用更高阶。
八、总结
这次实现了完整的球谐函数环境光照系统,核心技术点:
理论层面:
- SH 正交基函数在球面上的定义与直觉意义
- SH 投影的蒙特卡洛积分(均匀球面采样,权重 $4\pi/N$)
- Ramamoorthi 的 Lambertian 卷积定理,$A_l$ 系数的推导与物理意义
- 为什么 L2(9系数)是漫反射的最优截断点
工程层面:
- 65536 样本的 SH 投影在 0.3 秒内完成,精度达到 < 3% 误差
- 运行时辐照度求值只需 9 次乘加,可以内联在任何着色器中
- 程序化天空中高频太阳盘面直观演示 SH 的频率带宽限制
精度验证:SH 重建 vs 512spp MC 参考,漫反射误差 < 3%,速度提升约 50 倍。这个数据来自对比图的像素采样,不是目测。
参考文献
- Ramamoorthi, R. & Hanrahan, P. (2001). An Efficient Representation for Irradiance Environment Maps. SIGGRAPH 2001.
- Sloan, P., Kautz, J. & Snyder, J. (2002). Precomputed Radiance Transfer for Real-Time Rendering in Dynamic, Low-Frequency Lighting Environments. SIGGRAPH 2002.
- Pharr, M., Jakob, W. & Humphreys, G. (2023). Physically Based Rendering, 4th ed.
- Real-Time Rendering, 4th ed., Chapter 10.