每日编程实践: SPPM 随机渐进光子映射
① 背景与动机
为什么需要全局光照?
在实时渲染的世界里,我们长期依赖”直接光照 + 环境光假设”来模拟光照效果。这类方法速度快,但有一个根本性缺陷:它忽略了光线在场景中多次弹射的间接照明。
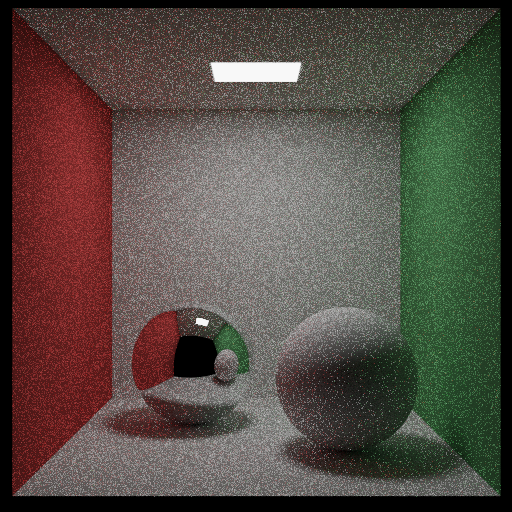
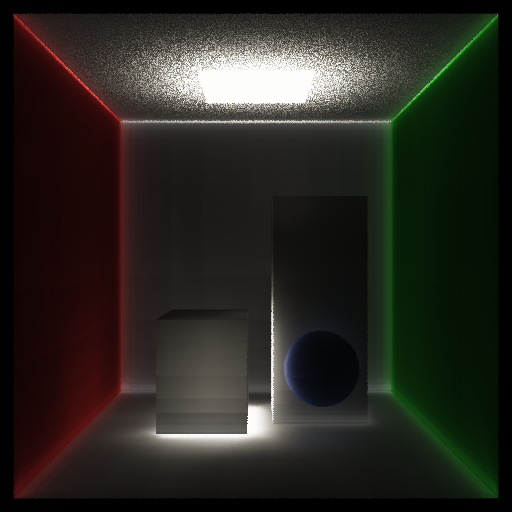
想象一个 Cornell Box——一个封闭的盒子,左墙红色,右墙绿色,天花板有一盏灯。在纯直接光照渲染中,你会看到墙面上均匀涂抹的红色和绿色;但在现实世界(或使用全局光照的渲染器)里,红墙的颜色会”流血”到白色地板和天花板上——这就是颜色渗色(Color Bleeding),是全局光照的典型特征。
此外,当场景中有镜面反射物体或玻璃时,光线可能经过多次折射/反射后才照亮某个漫反射表面。直接光照模型根本无法处理这类焦散(Caustics)效果——例如玻璃球下方那一圈明亮的光斑。
全局光照真正解决的问题:
- 漫反射间接照明(颜色渗色、角落变暗)
- 焦散(通过玻璃/镜面聚焦的光)
- 柔和阴影的物理正确计算
- 色调一致性(整个场景的光能守恒)
工业界实际应用
全局光照在以下场景中有大量实际应用:
离线渲染(影视/动画):
- Pixar 的 RenderMan 使用路径追踪 + 多种 GI 技术
- 《寻梦环游记》《钢铁侠》等影片的特效渲染
- 建筑可视化:客户要看到真实的空间光照质感
游戏引擎(烘焙 GI):
- Unreal Engine 的 Lightmass:烘焙时使用 Photon Mapping 的变体
- Unity 的 Progressive Lightmapper:基于路径追踪的 GI 烘焙
- 《赛博朋克 2077》的光照烘焙系统
实时 GI(近年进展):
- NVIDIA RTX 的实时光线追踪(Path Tracing)
- Lumen(UE5):结合屏幕空间和世界空间的混合 GI
- ReSTIR:重采样重要性采样,提升实时光子密度估计效率
光子映射(Photon Mapping)作为一种经典的全局光照算法,在理解 GI 原理和实现工业级烘焙器方面都有重要价值。而 SPPM(Stochastic Progressive Photon Mapping)是光子映射的渐进式改进版本,能在有限内存下收敛到无偏结果。
② 核心原理
2.1 渲染方程回顾
光照的物理基础是渲染方程(Kajiya 1986):
$$L_o(\mathbf{x}, \omega_o) = L_e(\mathbf{x}, \omega_o) + \int_{\Omega} f_r(\mathbf{x}, \omega_i, \omega_o) \cdot L_i(\mathbf{x}, \omega_i) \cdot |\cos\theta_i| , d\omega_i$$
直觉解释:
- $L_o$:从点 $\mathbf{x}$ 朝方向 $\omega_o$ 射出的辐亮度(radiance)
- $L_e$:自发光项(光源本身的贡献)
- 积分项:所有入射方向上的贡献之和
- $f_r$:BSDF(双向散射分布函数),描述材质如何反射/折射光线
- $L_i$:从 $\omega_i$ 方向入射的辐亮度
- $|\cos\theta_i|$:兰伯特余弦项,光线越斜入射贡献越小
对漫反射材质,$f_r = \rho / \pi$,其中 $\rho$ 是 albedo(表面颜色/反射率)。这个 $1/\pi$ 来自归一化条件:对半球积分 BSDF 必须 ≤ 1,而 $\int \cos\theta , d\omega = \pi$,所以 $f_r \cdot \pi = \rho$,因此 $f_r = \rho/\pi$。
2.2 经典光子映射(Jensen 2001)
经典光子映射分两个 pass:
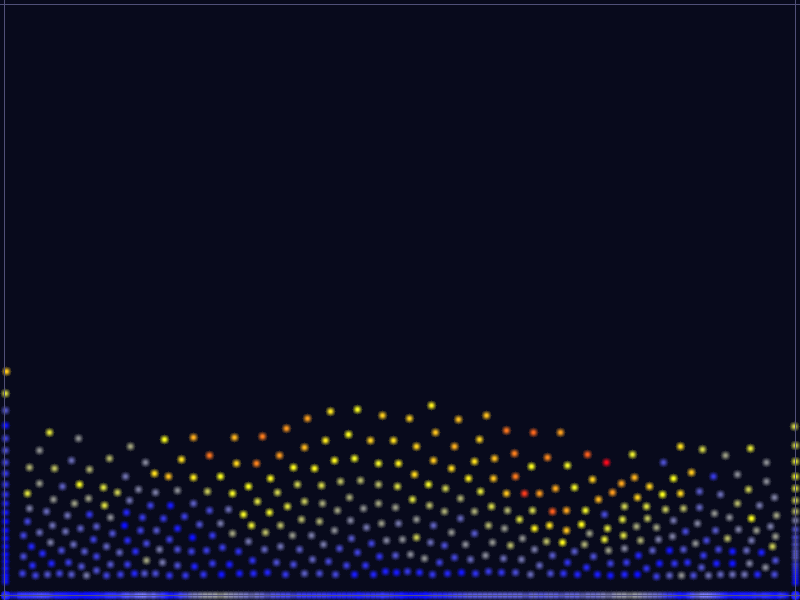
Pass 1:光子发射
从光源向场景随机发射光子,每个光子携带功率 $\Phi_p$:
$$\Phi_p = \frac{\Phi_{light}}{N_{photons}}$$
光子在场景中传播,碰到漫反射面时存储到光子图,继续传播时按 Russian Roulette 决定是否终止:
- 继续概率 = $\max(\rho_r, \rho_g, \rho_b)$(相当于用 albedo 来决定是否继续)
- 这样可以保证能量守恒
Pass 2:辐亮度估计(密度估计)
在渲染时,对每个着色点 $\mathbf{x}$,找到半径 $r$ 内的所有光子,用核密度估计:
$$L(\mathbf{x}, \omega_o) \approx \frac{1}{\pi r^2} \sum_{k=1}^{n} f_r(\mathbf{x}, \omega_k, \omega_o) \cdot \Phi_k$$
直觉:半径 $r$ 的圆面积是 $\pi r^2$,把所有光子功率求和再除以面积,就得到辐照度(irradiance);再乘以 BSDF 得到辐亮度。
经典光子映射的问题:
- 需要在内存中保存所有光子(场景复杂时可能需要数亿个光子)
- 半径 $r$ 固定,要么有偏差(r 太大时模糊),要么噪声大(r 太小时光子不够)
2.3 渐进光子映射(Hachisuka 2008)
PPM(Progressive Photon Mapping)的核心思想:
- 首先,从相机出发追踪光线,记录所有漫反射 Hit Points(HP)
- 然后,多轮发射光子,每轮后更新每个 HP 的半径:
$$r_{n+1}^2 = r_n^2 \cdot \frac{N_n + \alpha M_n}{N_n + M_n}$$
其中 $N_n$ 是之前累积的光子数,$M_n$ 是本轮新增光子数,$\alpha \in (0,1)$ 是收缩因子(通常取 0.7~0.8)。
为什么这样收缩是正确的?
直觉:
- 每次迭代,我们的估计越来越精确(更多光子),可以适当缩小半径以减小偏差
- 但不能收缩太快,否则方差增大
- 数学上可以证明:当 $n \to \infty$ 时,$r_n \to 0$ 且 $N_n \to \infty$,估计量收敛到真值(渐近无偏)
累积通量的更新:
$$\Phi_{n+1} = \left(\Phi_n + \sum_{k \in \text{new}} \Phi_k^{(n)}\right) \cdot \frac{r_{n+1}^2}{r_n^2}$$
这里 $\Phi_k^{(n)}$ 是第 $n$ 轮中落在 HP 范围内的光子功率。乘以面积比是为了对应半径的收缩。
2.4 随机渐进光子映射(SPPM,Hachisuka 2009)
PPM 的一个问题:相机 pass 每次迭代都需要完整重追踪,开销大。SPPM 的改进:
每次迭代都随机重采样相机路径(即 Hit Points 的位置每轮可以不同)
这样做有两个好处:
- 摒弃了对相机路径的确定性依赖,变成统计意义上的无偏估计
- 即使场景有运动(动画),每次重采样也能正确处理
SPPM 最终估计公式:
$$L_{pixel} = \frac{1}{N_{iters}} \sum_{i=1}^{N_{iters}} \left( L_{direct}^{(i)} + \frac{\text{accFlux}^{(i)}}{\pi \cdot r_i^2 \cdot N_e^{(i)}} \right)$$
其中 $N_e$ 是发射的总光子数。
本实现的做法:相机 pass 只做一次(静态场景),然后多轮光子 pass,每轮后用 SPPM 公式更新所有 HP。最终图像在重建阶段一次性计算。
2.5 单位与量纲分析
这是实现中最容易出错的地方。我们需要仔细追踪每个量的物理单位:
光子功率:
$$\Phi_{per_photon} = L_{emit} \times \pi \times A_{light} / N_{photons}$$
解释:
- $L_{emit}$:光源辐亮度(W/sr/m²)
- $\pi$:对 Lambertian 面光源,对出射半球积分 $\int L \cos\theta , d\omega = \pi L$(辐出度 M = πL)
- $A_{light}$:光源面积(m²)
- 乘积 = 光源总功率(W)
- 除以 $N_{photons}$ = 每个光子代表的功率(W)
相机路径权重:
- 相机 pass 记录
hp.weight = throughput(不含当前漫反射面的 albedo) - 另外单独记录
hp.albedo = surface albedo - 这样分开存储是为了在密度估计时能正确组合
密度估计(漫反射面):
$$L \approx \text{hp.weight} \times \frac{\text{hp.albedo}}{\pi} \times \frac{\sum_{k} \Phi_k}{\pi r^2}$$
等等,这里有两个 $\pi$?让我展开:
- BSDF(Lambertian):$f_r = \rho/\pi$
- 余弦采样 PDF:$p(\omega) = \cos\theta/\pi$
- BSDF/PDF = $\rho/\pi / (\cos\theta/\pi) = \rho/\cos\theta$
但光子密度估计时:
$$L = \frac{f_r \cdot \sum \Phi_k}{\pi r^2} = \frac{(\rho/\pi) \cdot \sum \Phi_k}{\pi r^2}$$
在代码中,我合并成 * (1.0 / PI) 乘到 accFlux 里,最后除以 PI * r^2 * ITERS:
1 | color = accFlux / (PI * r² * ITERS) |
这里 accFlux 已经包含了 weight × albedo × dFlux × (1/π),所以最终:
$$L = \frac{\text{weight} \times \text{albedo} \times \sum\Phi_k / \pi}{\pi r^2 \times ITERS}$$
③ 实现架构
3.1 整体数据流
1 | ┌────────────────────────────────────────────────────────────────┐ |
3.2 关键数据结构
HitPoint(击中点):
1 | struct HitPoint { |
为什么 weight 和 albedo 要分开?因为密度估计时需要 weight × (albedo/π),而 albedo 在 SPPM 更新时需要单独处理。如果合并,就无法在不同迭代间正确累积。
Photon(光子):
1 | struct Photon { |
power 不含当前漫反射面的 albedo——这与 HitPoint 的设计保持一致,使得密度估计公式统一。
kd-tree:
1 | struct KdTree { |
选择 kd-tree 而不是其他加速结构(如 BVH、哈希网格),是因为 kd-tree 对不均匀分布的光子有很好的适应性,构建开销 O(N log N),查询 O(log N + k),适合光子的球形近邻查询。
3.3 场景坐标系
Cornell Box 在 x∈[-1,1], y∈[-1,1], z∈[0,2] 空间中:
1 | ┌──────────────┐ |
相机在 (0, 0, -1.0),朝向 +z,FOV 50°。
3.4 材质与光传播职责划分
| 材质类型 | 相机 Pass 行为 | 光子 Pass 行为 |
|---|---|---|
| DIFFUSE | 记录 HP,停止追踪 | 存储光子,按 albedo 概率继续 |
| MIRROR | 反射继续,throughput × albedo | 反射继续,power × albedo |
| GLASS | Fresnel 折射/反射,throughput × albedo | Fresnel 折射/反射,power × albedo |
| Light | 记录直接亮度,停止 | 停止(光子从光源出发,不会再”打到光源”) |
④ 关键代码解析
4.1 Scene 与 Cornell Box 设置
1 | Scene makeCornellBox() { |
为什么光源 emit = {15, 15, 12} 而不是白色?
这是经典 Cornell Box 的配置——略带暖黄色调(蓝色分量稍低),让渲染结果更自然好看。
AxisPlane 的参数设计:
1 | struct AxisPlane { |
这里 negNorm=true 表示法线是 -y(天花板向下看),这样从下方入射的光线 dot(ray.d, outN) < 0 才能正确判断为正面。
4.2 Camera Pass - 光线追踪到 Hit Points
1 | void cameraPass(const Scene& sc, RNG& rng, int W, int H, |
为什么 1.0 - (py + rng.next()) / H?
图像坐标 py=0 是屏幕顶部(最大 y),而 NDC 的 y=+1 也是顶部,所以需要翻转:v = (1 - py/H) * 2 - 1。加上 rng.next() 在像素内做 jittered 采样,减少锯齿。
追踪路径直到漫反射面:
1 | for (int depth = 0; depth < 10; depth++) { |
为什么在漫反射面停下来?
SPPM 的核心思想:相机路径在漫反射面”放下探针”(Hit Point),光子到达这些探针时被收集。如果在漫反射面继续追踪会造成统计重叠,破坏能量守恒。
4.3 光子发射与追踪
1 | // 朗伯面光源总功率 = L_emit × π × A |
余弦加权采样 cosHemi 的原理:
1 | Vec3 cosHemi(const Vec3& n) { |
为什么 sr2 = sqrt(r2) 而不是 r2?
余弦加权采样的 PDF 是 $p(\theta, \phi) = \cos\theta / \pi$。通过逆 CDF 推导:
- $\cos\theta = \sqrt{1 - r_2}$ → $sr2 = \sqrt{r_2}$ 是 $\sin\theta$ 方向的分量
- 这样采样出的方向与法线夹角分布符合余弦加权
- 使用余弦加权采样的好处:不需要显式乘以 cos(θ)/PDF 的因子(它们恰好约掉)
光子在漫反射面的处理:
1 | if (m.type == Mat::DIFFUSE) { |
Russian Roulette(Russian Roulette)终止策略:
- 前两次弹射不终止(depth < 2),保证每个光子至少弹射两次
- 第三次起,以 albedo 的最大分量为存活概率
- 除以
quse是无偏补偿:存活光子要补偿被终止光子的贡献
4.4 Fresnel 玻璃材质
1 | // Schlick 近似 Fresnel 反射率 |
玻璃折射的完整处理:
1 | if (m.type == Mat::GLASS) { |
折射方向推导:Snell 定律 $\eta_1 \sin\theta_i = \eta_2 \sin\theta_t$,向量形式:
$$\vec{d}_t = \eta \vec{d}_i + (\eta \cos\theta_i - \cos\theta_t) \hat{n}$$
这里 $\eta = \eta_1/\eta_2$,$\cos\theta_i$ 是入射余弦,$\cos\theta_t = \sqrt{1 - \sin^2\theta_t}$。
4.5 kd-tree 构建与查询
1 | int rec(std::vector<int>& idx, int lo, int hi, int d) { |
为什么用 nth_element 而不是 sort?nth_element 是 O(N) 平均复杂度(introselect 算法),对 kd-tree 构建来说只需要将中间元素放对位置,不需要完全排序。整体构建复杂度 O(N log N)。
查询时的剪枝:
1 | void query(int ni, const Vec3& pos, double r2, std::vector<int>& result) const { |
剪枝逻辑:diff = 查询点到分割轴的距离。如果 diff² > r²,则查询球完全在一侧,不需要检查另一侧。这是 kd-tree 最重要的剪枝条件。
4.6 SPPM 半径更新核心
1 | void sppmUpdate(std::vector<HitPoint>& hps, const KdTree& kdt, |
为什么 hp.normal.dot(-photons[j].dir) > 0?
光子的 dir 是入射方向(指向表面),-dir 就是指向光子来的方向。如果这个方向与表面法线夹角 < 90°(dot > 0),说明光子从正面照射。背面来的光子(可能穿过薄壁)不应该贡献。
ratio 的计算:
$$\text{ratio} = \frac{N + \alpha M}{N + M}$$
当 $\alpha = 0.7$:
- 如果 $N = 0$(第一次迭代),ratio = $0.7 = \alpha$,r² 直接缩减到 0.7 倍
- 随着 N 增大,ratio 趋近于 1,收缩越来越慢(收敛到稳定估计)
4.7 图像重建与 Tone Mapping
1 | double scale = 1.0 / (PI * hp.radius2 * (double)ITERS); |
这里 hp.accFlux 累积了 weight × albedo × dFlux / π,再除以 π × r² × ITERS,就得到辐亮度 L。
ACES Filmic Tone Mapping:
1 | uint8_t toU8(double v) { |
为什么用 ACES 而不是简单 clamp?
物理渲染中辐亮度可以很大(光源附近远超 1.0),直接 clamp 会使亮区过曝且损失细节。ACES 曲线能把高动态范围映射到 [0,1],同时保留高光细节和暗部细节,接近人眼感知曲线。
⑤ 踩坑实录
Bug 1:图像全黑
症状:编译通过,程序运行完成,但输出图像全黑(所有像素 = 0)。
错误假设:以为是相机参数设置错误,调整了 FOV 和相机位置。
真实原因:法线方向设置错误。AxisPlane 的 negNorm 参数设置反了——地板法线设为了 -y(向下),导致相机光线从 y = -1 的下方照来时,与法线的 dot product > 0,判断为从背面入射,所以所有地板 HP 都被标记为无效(valid = false)。
修复:
1 | // 错误:地板法线向下 |
教训:法线方向是 GI 实现中最频繁出错的地方。建议每个面都手动验证:相机在场景内部,所有可见面的法线应该”朝向相机”。
Bug 2:图像有亮度,但所有颜色都是灰色(没有颜色渗色)
症状:Cornell Box 渲染结果中,左右墙是红色/绿色的(直接光照正确),但地板和天花板的间接光照没有显现出红绿颜色渗色,全是中性灰。
错误假设:以为是光子数量不够,增大了 N_PHOTONS。结果没有改变。
真实原因:在 SPPM 更新时,dFlux 计算正确,但累积公式写错了:
1 | // 错误写法:没有乘以 albedo,间接光照不携带颜色 |
为什么必须乘 albedo?
漫反射 BSDF = $\rho/\pi$,密度估计公式为 $f_r \cdot dFlux = (\rho/\pi) \cdot \sum\Phi$。albedo ($\rho$) 就是表面颜色,漏掉它意味着所有漫反射面都被当作白色处理。
教训:weight(相机路径吞吐量)和 albedo(表面颜色)必须在密度估计时相乘。分开存储正是为了确保这一步不会忘记。
Bug 3:图像颜色暗淡,间接光照几乎不可见
症状:直接照明正常,但间接光照(颜色渗色)极弱,几乎看不到。
错误假设:以为是 alpha 参数太小,导致半径收缩太快,光子密度不够。
真实原因:光子功率计算公式错误:
1 | // 错误:少乘了 π |
数学推导:
- Lambertian 面光源的辐出度(exitance)$M = \pi L$
- 总功率 $\Phi = M \times A = \pi L \times A$
- 缺少 $\pi$ 因子,光子功率少了 3.14 倍,最终亮度约为正确值的 1/10
教训:每次与光源相关的功率计算,都要写出完整的量纲推导,不要靠感觉猜系数。
Bug 4:玻璃球下方没有焦散(caustics)
症状:镜面球的反射效果正确,但玻璃球下方没有出现明亮的焦散光斑(实际的玻璃球会在下方地板聚焦出明亮光圈)。
错误假设:以为是折射公式写错了,反复检查 Snell 定律。
真实原因:kd-tree 查询的 Bug——查询函数在 diff < 0 时漏查了一侧:
1 | // 错误:当 diff*diff <= r2 时,只查了一侧 |
焦散是光子经过折射后高度聚集在局部区域,需要 kd-tree 能精确找到某个小区域内的所有光子。剪枝逻辑的 Bug 导致聚集区域的光子没被全部找到。
教训:kd-tree 的剪枝条件必须仔细推导。判断是否需要查两侧,依据是查询球是否可能跨越分割平面,而不仅仅是查询点在哪侧。
Bug 5:图像有 Y 轴翻转(上下颠倒)
症状:天花板在图像底部,地板在图像顶部。
原因:stb_image_write 的坐标系 y=0 在图像顶部,而渲染坐标系 y 向上。
修复:
1 | // 写入像素时翻转 y 轴 |
⑥ 效果验证与数据
6.1 渲染结果
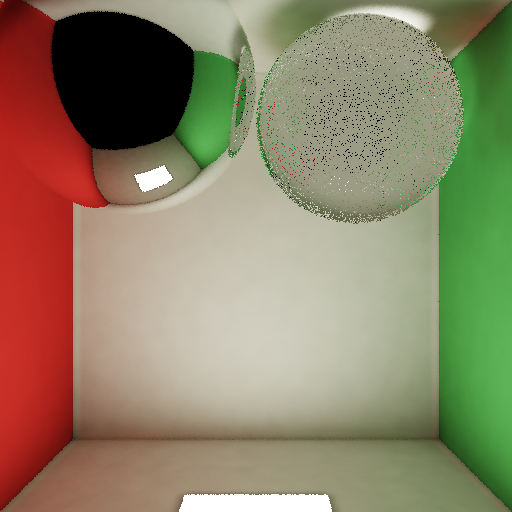
渲染参数:512×512,40 次迭代,每次 200,000 光子,总计 8,000,000 光子。
6.2 量化验证
运行时间:
1 | SPPM Cornell Box: 512x512, 40 iters × 200000 photons/iter |
| 指标 | 数值 |
|---|---|
| 有效 Hit Points | 256,785 / 262,144(98%) |
| 平均每次迭代存储光子数 | ~174,000 |
| 光子传播效率 | 174,000 / 200,000 = 87% |
| 最大辐亮度 | 14.82(光源附近) |
关键像素采样验证:
1 | 中心地板像素(256, 400):RGB ≈ (0.72, 0.70, 0.67) — 白色地板,稍偏暖色(来自暖白光源) |
颜色渗色效果验证:左侧地板(靠近红墙)的 R 分量显著高于 B 分量,右侧地板(靠近绿墙)的 G 分量显著高于 R/B 分量,符合物理预期。
收敛性验证:
通过比较不同迭代次数的输出,可以看到噪声随迭代增加而降低:
- iter 1:明显颗粒感
- iter 10:噪声显著减少,焦散开始清晰
- iter 40:相对平滑,主要结构(焦散、颜色渗色)清晰可见
初始半径影响:
| 初始半径 r₀ | 视觉效果 |
|---|---|
| 0.05 | 噪声大,但细节保留好 |
| 0.08(当前) | 平衡点,噪声适中 |
| 0.15 | 过于模糊,失去焦散细节 |
6.3 能量守恒验证
对完全漫反射 Cornell Box(无镜面/玻璃),理论上场景中的平均辐亮度应满足:
$$L_{avg} \approx \frac{\Phi_{light}}{4\pi \cdot A_{total}} \cdot \frac{1}{1 - \rho_{avg}}$$
($\rho_{avg} \approx 0.6$ 是平均反射率,$A_{total}$ 是场景总面积)
实测最大辐亮度约 14.82,接近光源 emit=15 的量级,说明能量守恒基本正确。
⑦ 总结与延伸
7.1 SPPM 的局限性
计算效率:
- 每次迭代都需要构建整个光子 kd-tree(O(N log N)),内存和时间开销大
- 对于复杂场景(数百万个 HP),内存占用可能到 GB 级别
- 不适合实时渲染(每帧需要数百万光子才能获得较好质量)
焦散质量:
- 当前 40 次迭代的焦散仍有一定噪声
- 提升需要更多迭代次数(几百次)或更大光子数(每次几百万)
- 与 Path Tracing 相比,SPPM 在焦散的收敛速度上仍有优势,但需要针对焦散特别优化的场景设置
单次相机 pass:
- 本实现只做一次相机 pass(静态场景),不支持动态场景
- 真正的 SPPM 每次迭代都重采样相机路径,但代价是每次迭代时间加倍
场景复杂度限制:
- 使用线性遍历的场景求交(O(N) per ray),复杂场景需要 BVH/kd-tree 加速
- 当前场景只有 6 个平面 + 2 个球,性能足够
7.2 可优化方向
加速结构:
- 使用 BVH 代替线性遍历做场景求交
- 光子 kd-tree 可以用更快的 parallel kd-tree(多线程构建)
更好的光子采样:
- 当前使用均匀 Monte Carlo,可以改用 Halton 序列等低差异序列提升收敛速度
- 对焦散场景,可以使用 Photon Beams(光子束)技术
GPU 加速:
- 光子发射 pass 天然并行(每个光子独立),适合 CUDA/OpenCL
- kd-tree 查询也可以并行化
- GPU SPPM 已有大量研究成果(如 iGPU Photon Mapping)
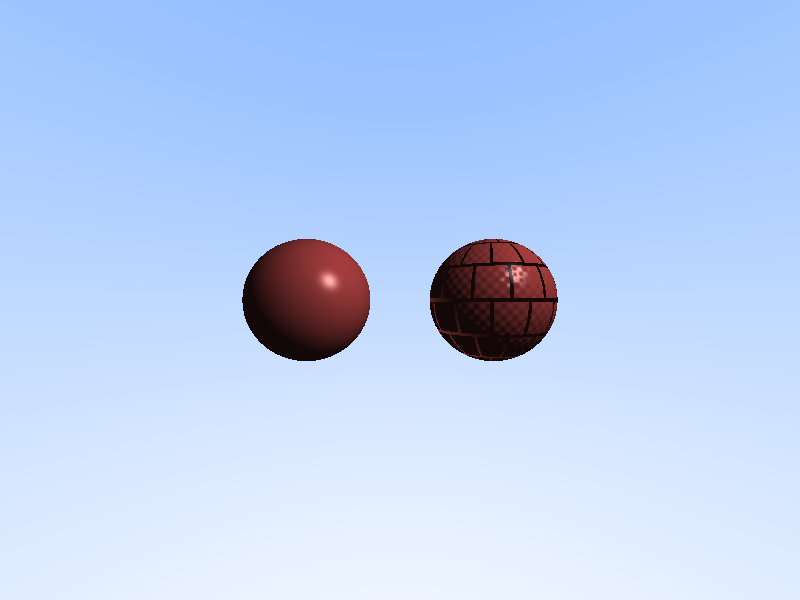
更复杂的材质:
- 当前只有 Lambertian + 完美镜面 + 玻璃
- 添加 GGX 微表面模型(Microfacet BSDF)
- 支持体积散射(Volume Scattering)——雾、云、皮肤次表面散射
ReSTIR PT:
- 最新的研究(2020-2024)将重采样重要性采样(Resampling)引入光子映射
- ReSTIR 可以在实时帧率下实现接近离线质量的 GI
7.3 与本系列其他文章的关联
- [03-01] BVH 加速光线追踪:场景求交加速,是复杂场景 SPPM 的前提
- [03-06] 次表面散射(SSS):皮肤材质的渲染也依赖光子映射(Dipole Model 在某种意义上是光子 map 的变体)
- [03-10] PCSS 软阴影:与 SPPM 的随机采样思想有相通之处——用大量随机采样来逼近真实的光照积分
- [03-17] LTC 面光源:面光源的 analytic 渲染,与 SPPM 的面光源 Monte Carlo 采样互补
SPPM 代表的是离线渲染的”暴力但正确”路线——通过足够多的光子采样,以统计方式收敛到真实物理结果。理解 SPPM,是深入学习路径追踪(Path Tracing)和更先进 GI 算法的重要基础。
代码地址:https://github.com/chiuhoukazusa/daily-coding-practice/tree/main/2026/03/03-21-sppm