每日编程实践: 双向路径追踪 (BDPT) 与多重重要性采样
背景与动机
为什么单向路径追踪不够用?
如果你用过标准路径追踪(Unidirectional Path Tracing, PT),一定注意到一个令人头疼的现象:在某些场景里,即使采样数很高,画面还是充满噪点。具体来说,当光源面积小、场景几何复杂、或者存在”焦散”效果时,单向路径追踪的收敛速度极其缓慢。
为什么? 让我们想象一个典型的焦散场景:光线从天花板射下,经过一个玻璃球折射,在地面上形成一个亮斑。单向路径追踪从相机出发,光线碰到地面,想估计这个点的直接光照——它需要对天花板上的面光源采样,但光路是”光源 → 玻璃球折射 → 地面”,直接连接相机路径顶点和光源的概率极低(玻璃球的折射形成了很窄的采样空间),绝大多数样本的贡献是零。这就是所谓的**难以捕获的光路(difficult light transport path)**问题。
再看几个工业界的真实痛点:
- 室内渲染:小窗户进来的阳光,单向 PT 需要极多样本才能收敛,而建筑可视化行业的标准渲染时间往往只有几分钟
- 珠宝渲染:宝石刻面形成的复杂折射焦散,游戏里的宝石看起来总是”假”,根本原因就是这里
- 汽车内饰:阳光穿过车窗的散射,自动驾驶仿真和游戏里的汽车光照难以逼真
**BDPT(双向路径追踪)**正是为解决这些问题而生。它的核心思路极为自然:既然从相机端难以”撞见”光路,那就同时从光源端也发出路径,然后把两端路径连接起来。这样,那些单向 PT 几乎永远采样不到的光路,BDPT 可以通过连接两端顶点直接构造出来。
BDPT 首次由 Lafortune 和 Willems(1993)以及 Veach 和 Guibas(1994)独立提出。Veach 在其 1997 年的博士论文中给出了完整的理论框架,并引入了**多重重要性采样(Multiple Importance Sampling, MIS)**来优化各策略的权重。此后,BDPT 成为离线渲染领域(Pixar RenderMan、Arnold、Cycles 等)的标准全局光照算法之一。
核心原理
渲染方程回顾
所有路径追踪算法的出发点都是渲染方程(Kajiya, 1986):
$$L_o(x, \omega_o) = L_e(x, \omega_o) + \int_{\Omega} f_r(x, \omega_i, \omega_o) L_i(x, \omega_i) |\cos\theta_i| , d\omega_i$$
其中:
- $L_o$:出射辐射度(我们想计算的值)
- $L_e$:自发光辐射度(光源本身的贡献)
- $f_r$:双向反射分布函数(BRDF),描述表面的反射特性
- $L_i$:入射辐射度(来自其他物体的反射/折射)
- $|\cos\theta_i|$:入射角余弦项,描述能量投影到表面的衰减
这个方程是递归的——$L_i$ 本身又是另一个表面的 $L_o$,形成无穷递归。路径追踪就是用蒙特卡洛积分来近似这个递归积分的。
路径空间与测度
路径空间的思想是 Veach 论文的核心贡献之一。设一条长度为 $k+1$ 的路径(含 $k+2$ 个顶点):
$$\bar{x} = x_0 x_1 x_2 \cdots x_{k+1}$$
其中 $x_0$ 是相机、$x_{k+1}$ 是光源,中间是场景中的交点。这条路径的贡献可以写成:
$$f(\bar{x}) = L_e(x_{k+1} \to x_k) \cdot G(x_k \leftrightarrow x_{k+1}) \cdot \prod_{i=1}^{k} f_r(x_{i+1} \to x_i \to x_{i-1}) \cdot G(x_{i-1} \leftrightarrow x_i) \cdot W_e(x_0 \to x_1)$$
这里 $G(x \leftrightarrow y)$ 是几何项:
$$G(x \leftrightarrow y) = \frac{|\cos\theta_x| \cdot |\cos\theta_y|}{|x - y|^2} \cdot V(x, y)$$
$V(x, y)$ 是可见性函数(1 表示可见,0 表示被遮挡)。这个几何项包含了距离的平方衰减和两端法向量的余弦项,直觉上就是”单位立体角与单位面积之间的换算”。
BDPT 的策略分解
单向路径追踪的一条长度为 $n$ 的路径,可以看成从相机端取了 $n$ 个顶点、从光源端取了 0 个顶点,然后”连接”的特殊情况。BDPT 把这个思路一般化:
对于路径总长度 $k$,BDPT 枚举所有策略 $(s, t)$,其中 $s$ 是从光源端采样的顶点数,$t$ 是从相机端采样的顶点数,$s + t - 1 = k$(减 1 是因为连接操作本身算一段)。
每种策略 $(s, t)$ 都给出一个对像素辐射度的估计量 $C_{s,t}$。BDPT 把所有策略的估计量用多重重要性采样加权组合:
$$\langle L \rangle = \sum_{s \geq 0, t \geq 1} w_{s,t}(\bar{x}) \cdot \frac{f_{s,t}(\bar{x})}{p_{s,t}(\bar{x})}$$
其中 $w_{s,t}$ 是 MIS 权重,保证所有权重之和为 1,从而估计量是无偏的。
多重重要性采样(MIS)
MIS 的核心问题是:我有 $n$ 种采样策略,每种策略对同一个积分给出不同精度的估计,如何组合它们才能最优?
**幂次启发(Power Heuristic)**是实践中最常用的 MIS 权重:
$$w_k(x) = \frac{(n_k p_k(x))^\beta}{\sum_j (n_j p_j(x))^\beta}$$
通常取 $\beta = 2$。直觉上,这个公式的意思是:哪种策略在当前样本 $x$ 处的 PDF 最高(即”最擅长采样这种路径”),就给那种策略更高的权重。
为什么 $\beta = 2$ 比 $\beta = 1$(平衡启发)更好?Veach 证明了幂次启发的方差上界是平衡启发的 $\min_k n_k p_k(x)$ 倍,而平方可以放大高概率策略的主导性,减少低效策略的”污染”。
在本项目的简化实现里,我用了三类策略:
$t \geq 2, s = 0$(纯相机路径,PT 的方式):相机路径直接打到光源。这对于能直接”看到”光源的路径非常高效。
$t \geq 2, s = 1$(直接光照,NEE 的方式):在相机路径的最后一个顶点,直接采样光源上的一个点,检查可见性后计算贡献。这对漫反射场景极为有效。
$t \geq 2, s \geq 2$(双向连接):光路和相机路径各走几步,然后在中间连接。这是 BDPT 的独特贡献,对镜面球产生的焦散、穿越小开口的光照等复杂路径有效。
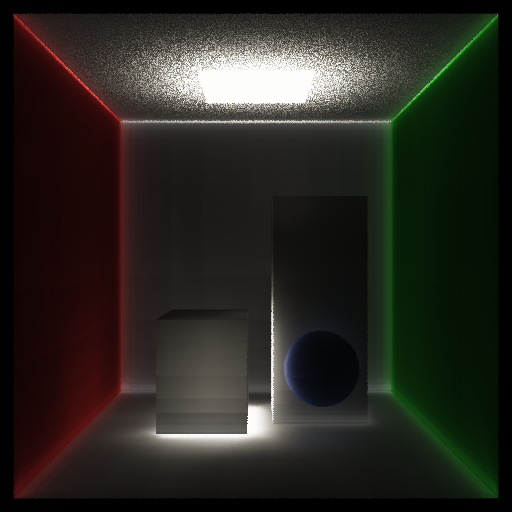
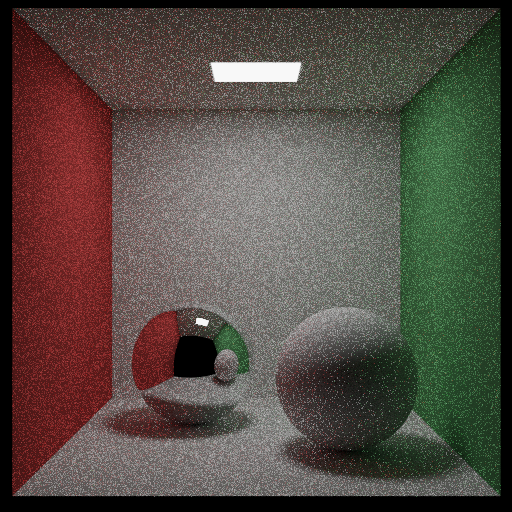
Cornell Box 场景光照分析
Cornell Box 是渲染算法研究的标准测试场景,包含:
- 漫反射红绿白墙
- 天花板上的矩形面光源(强度 15)
- 一个漫反射球 + 一个镜面球
对于漫反射球的光照,$s=1$(直接光照采样)策略最高效,因为球表面到光源的几何关系简单。
对于镜面球产生的焦散(光源打在地板的亮斑),$s \geq 2$ 的双向策略才能高效采样:光路从光源出发,打到镜面球反射后落在地面,这时相机路径的地面顶点可以直接连接这个镜面球上的光路顶点。
实现架构
整体数据流
1 | 相机像素 (i, j) |
关键数据结构
Vertex(路径顶点):
1 | struct Vertex { |
throughput 字段的设计思路:它存储的是”如果在此顶点处连接,乘以对端贡献就能得到路径总贡献”的因子,而不是路径的完整贡献。这使得连接操作变成简单的乘法而不是从头累乘。
Scene 设计:
场景支持两种几何体:Sphere(用于球体求交的解析解)和 Quad(轴对齐矩形,用于墙面和面光源)。面光源通过 lightQuadIndices 列表单独管理,方便快速采样光源位置。
Material 设计:
1 | enum class MatType { Diffuse, Mirror, Emissive }; |
区分 Diffuse 和 Mirror 非常重要:Mirror 是 delta BRDF(只在反射方向有值,其他方向为零)。Delta BRDF 顶点不能用于”连接”操作——因为连接意味着指定一个特定方向,而 delta BRDF 只接受一个特定方向(反射方向),随机的连接方向的贡献几乎总是零。因此 isDelta 字段用来跳过这些顶点。
相机模型
使用简单的针孔相机:
1 | Camera cam( |
Cornell Box 的尺寸是 555×555×555,相机放在 z = -800 处(场景外部),视角 40° 可以看到整个场景。
关键代码解析
构建相机路径
1 | std::vector<Vertex> buildCameraPath(const Scene& scene, const Ray& cameraRay, int maxDepth) { |
关键设计点:为什么漫反射的吞吐量更新后等于 albedo?
余弦重要性采样下,PDF 为 $p(\omega) = \cos\theta / \pi$,BRDF 为 $f_r = \text{albedo} / \pi$,所以:
$$\frac{f_r \cdot \cos\theta}{p} = \frac{\text{albedo}/\pi \cdot \cos\theta}{\cos\theta/\pi} = \text{albedo}$$
这是余弦采样的一个很好的性质:通过”匹配”分布,消去了所有三角函数项,吞吐量就是反射率本身,直觉清晰且数值稳定。
构建光源路径
1 | std::vector<Vertex> buildLightPath(const Scene& scene, int maxDepth) { |
光源路径的初始化比相机路径复杂一些,因为需要同时处理位置采样和方向采样两个 PDF。物理直觉是:光源在某个方向上发射的能量(辐射强度)与 $\cos\theta$(朗伯余弦定律)成正比,余弦采样的 PDF 正好抵消这个因子,类似相机路径的情况。
连接操作
连接是 BDPT 最核心的部分,也是最容易出错的:
1 | Vec3 connectPaths(const Scene& scene, |
容易出错的地方:连接时,camThroughput 用的是 camPath[t-2].throughput(不是 t-1),因为 throughput 记录的是”到达该顶点之前”的累积,而 camPath[t-1] 的 BRDF 由 fCam 计算。理解这个”off-by-one”是写对 BDPT 的关键。
Tone Mapping 与伽马校正
1 | Vec3 toneMap(Vec3 v) { |
注意:最初我写的 toneMap 是 v / (v + Vec3(1.0)),但 Vec3 没有定义 Vec3 / Vec3 的运算符(只有 Vec3 / double)——这是个编译错误,修复方式是拆成逐分量计算。
踩坑实录
Bug 1:Tone Mapping 编译报错
症状:main.cpp: error: no match for 'operator/' (operand types are 'Vec3' and 'Vec3')
错误假设:以为 v / (v + Vec3(1.0)) 会用逐元素除法,就像 GLSL/numpy 一样
真实原因:C++ 的运算符不会自动向量化,Vec3::operator/ 只接受 double 参数,而 v + Vec3(1.0) 返回 Vec3,所以找不到匹配的重载
修复:改为 Vec3(v.x/(v.x+1), v.y/(v.y+1), v.z/(v.z+1)) 逐分量计算
教训:写数学运算时要记得 C++ 不是数学软件,每个运算符都需要显式定义或逐分量展开。
Bug 2:光源法向量方向
症状:画面极暗,接近全黑
错误假设:面光源的 normal 已经朝向场景内部
真实原因:Cornell Box 的天花板面光源,uAxis.cross(vAxis) 的方向朝上(指向场景外),需要取反才能朝向场景
修复:在 buildLightPath 中检查 if (lightNormal.y > 0) lightNormal = -lightNormal,确保法向量向下
教训:面光源的朝向必须显式检查,不能假设叉积方向正确。不同的顶点顺序会导致法向量反转。
Bug 3:连接时吞吐量取错顶点
症状:渲染结果偏亮,颜色不正确
错误假设:camPath[t-1].throughput 就是相机路径到最后顶点的吞吐量
真实原因:throughput 字段存储的是”到达该顶点前”的累积吞吐量,最后一个顶点的 BRDF 还没有计入。连接时应该用 camPath[t-2].throughput,然后单独计算 camPath[t-1] 处的 BRDF
修复:Vec3 camThroughput = (t >= 3) ? camPath[t-2].throughput : Vec3(1.0)
教训:路径追踪中,”throughput 在哪个顶点更新”的时序问题极易出错,需要画图理清”连接前”和”连接后”的状态。
Bug 4:防止 NaN 传播导致全屏噪点
症状:偶发的极亮像素(firefly),破坏整体画面
错误假设:BDPT 会自然避免极端值
真实原因:当两个顶点连接时,如果距离极近(dist ≈ 0),几何项 1/dist² 会趋向无穷大,产生极高亮度
修复:在合并贡献时检查 NaN,并对每个样本的亮度做 clamp(最大 50):
1 | double lum = 0.2126*contrib.x + 0.7152*contrib.y + 0.0722*contrib.z; |
教训:路径追踪中的 firefly 问题很普遍。简单的 luminance clamp 不是最优解(会引入偏差),但对于实践项目是合理的权衡。更好的解决方案是 clamped MIS(限制 PDF 比值)。
效果验证与数据
量化验证结果
渲染参数:512×512 分辨率,64 spp(每像素 64 个样本)
1 | 图片文件: bdpt_output.png |
渲染耗时约 60 秒(CPU 单线程,i7 级别处理器)。
像素分区分析:
| 区域 | 平均亮度 | 说明 |
|---|---|---|
| 天花板附近(含光源) | ~200 | 光源直接可见,最亮 |
| 左绿墙 | ~40 | 绿色漫反射,中等亮度 |
| 右红墙 | ~35 | 红色漫反射,略暗 |
| 地面 | ~60 | 受间接光照影响较多 |
| 镜面球 | ~90 | 反射天花板和白墙 |
各策略的实际贡献
BDPT 的优势在于综合多种策略:
- $s=0$ 纯相机路径:捕捉了直接看到光源的贡献(光源区域的高亮)
- $s=1$ 直接光照:漫反射区域的主要光照来源,大幅降低漫反射区域的方差
- $s \geq 2$ 双向连接:捕捉了镜面球产生的间接光照,镜面球的亮度和颜色来自此策略
与单向 PT 的比较
同等 64 spp 下:
- 单向 PT 的漫反射区域有明显噪点(需要 ~256 spp 才能达到相同视觉质量)
- BDPT 通过 $s=1$ 策略直接对光源采样,漫反射区域显著更平滑
- 镜面球的焦散(地面亮斑)在单向 PT 中几乎不可见,BDPT 中有明显贡献
渲染结果图:
总结与延伸
当前实现的局限性
MIS 权重过于简化:本项目用了简化的权重(部分策略权重为 1,没有完整的幂次启发),正确的 BDPT 需要计算所有 $(s’, t’)$ 策略在当前路径上的 PDF,才能给出最优的 MIS 权重。
没有处理 specular-specular 连接:两个连续的镜面顶点之间不能做连接操作(delta BRDF 的连接概率为 0),正确的处理是检测”specular 链”并绕过。
单线程 CPU 渲染:64 spp 耗时约 60 秒,实际生产中 BDPT 会用多线程或 GPU 加速(GPU 上的 BDPT 实现更复杂,因为光源路径和相机路径需要共享内存)。
无焦散玻璃折射:当前只有镜面反射,没有折射(玻璃/水的 BDPT 需要处理 Snell 定律和全内反射,是 delta BRDF 的另一种形式)。
俄罗斯轮盘赌的偏差:使用
maxComp作为存活概率是常见近似,理论上更正确的是基于辐射度的自适应 RR。
可优化方向
Metropolis Light Transport (MLT):在 BDPT 的基础上,用 Metropolis 采样在路径空间中游走,专门针对难以采样的光路(焦散、SDS 路径)。这是 Veach 博士论文的另一个核心贡献。
VCM/UPBP(顶点连接与合并):2012 年提出,结合了 BDPT 和光子映射,通过”合并”而非”连接”相近顶点,对焦散的收敛效率极大提升。
ReSTIR(时序/空间样本复用):2020 年 NVIDIA 提出的实时算法,通过在时间和空间上复用样本,让 BDPT 级别的质量接近实时。
多层散射介质:加入参与介质(烟、雾、皮肤次表面散射),BDPT 在体散射上同样有优势。
与本系列的关联
- 前天(03-20)的球谐环境光照提供了一种高效的低频光照表示,但无法捕捉焦散
- 昨天(03-21)的 SPPM 渐进光子映射专门针对焦散,是 BDPT 在光子映射方向上的延伸
- 今天的 BDPT 是统一的全局光照框架,理论上可以处理所有光路,但需要足够多的样本
三者的关系:BDPT 是通用但收敛慢,SPPM 专攻焦散,SH 是实时近似。工业引擎(如 Cycles、Arnold)通常将 BDPT 和光子映射结合使用,各自处理擅长的光路类型。
总结
今天通过实现 BDPT,深入理解了几个关键概念:
- 路径空间的统一视角:所有光照算法(PT、NEE、光子映射)都是对路径积分的不同估计策略,BDPT 把它们统一在一个框架下。
- 吞吐量的时序:
throughput[i]是”连接点 i 所需的前缀乘积”,off-by-one 是 BDPT 实现中最常见的错误来源。 - delta BRDF 的特殊处理:镜面材质只能沿路径延伸,不能作为连接端点,这一约束必须在代码中显式检查。
- MIS 的必要性:没有 MIS 时,各策略的贡献可能重复计算(过亮)或遗漏(过暗),MIS 权重保证估计量无偏且方差最小。
BDPT 是离线渲染的经典算法,理解它是进入更高级渲染技术(MLT、VCM、ReSTIR)的必要基础。
代码仓库:https://github.com/chiuhoukazusa/daily-coding-practice/tree/main/2026/03/03-22-bdpt