每日编程实践: Voxel Cone Tracing — 用体素锥形追踪实现近似全局光照
一、背景与动机
全局光照的工程困境
光线追踪可以精确计算全局光照(Global Illumination,GI),但在实时渲染场景下代价极高。渲染一帧 1080P 图像,路径追踪往往需要每像素几十甚至上百条路径才能收敛——这对于 60FPS 的游戏来说显然不现实。
游戏引擎里用了哪些方案来”作弊”?
- 光照贴图(Lightmap):离线烘焙,无法响应动态物体
- Irradiance Volume(光照探针):动态性好,但空间分辨率有限
- SSAO(屏幕空间环境光遮蔽):只用屏幕信息,遮蔽范围受限
- Lumen(UE5):混合 SDF 追踪 + Radiance Cache,非常复杂
2011 年,Cyril Crassin 等人提出了 Voxel Cone Tracing(VCT),发表在 SIGGRAPH 论文”Interactive Indirect Illumination Using Voxel Cone Tracing”中。VCT 的核心思想是:
把场景体素化成一个带 Mipmap 的 3D 纹理,然后在着色时沿锥形方向”扫描”这个 3D 纹理,近似计算来自各方向的间接辐射度。
VCT 的魅力在于它能在实时帧率下产生有说服力的漫反射 GI 和镜面 GI,空间变化丰富,不依赖预计算。Unreal Engine 4 的 VXGI(NVIDIA 插件)、CryEngine 的 SVOGI 都基于这个思路。
没有 GI 会发生什么?
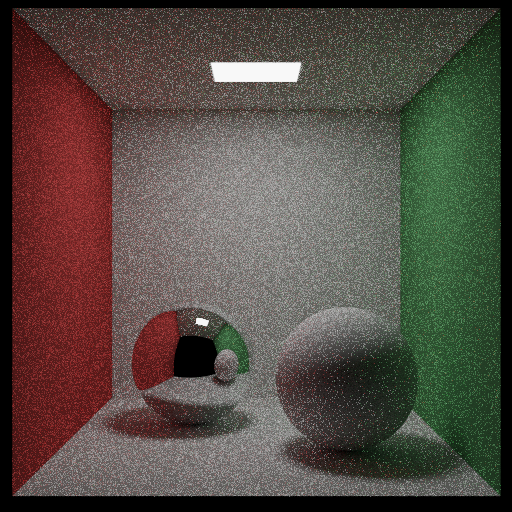
Cornell Box 场景如果只有直接光照,颜色渗色(Color Bleeding)就会完全消失。红色墙壁旁边的白色球体应该带上淡淡的红色——这是漫反射 GI 的关键效果。同样,镜面球体应该能看到周围环境的一次间接反射。这些效果没有 GI 是做不到的。
VCT 今天虽然已经被更现代的方案(DDGI、Lumen)部分取代,但它的思路依然优雅——把三维辐照度查询转化成体素锥形采样,是一个非常值得学习的设计。
二、核心原理
2.1 渲染方程回顾
着色点 $x$ 的出射辐射度 $L_o$ 满足渲染方程:
$$
L_o(x, \omega_o) = L_e(x, \omega_o) + \int_{\Omega} f_r(x, \omega_i, \omega_o) L_i(x, \omega_i) (\omega_i \cdot n) d\omega_i
$$
其中 $L_i(x, \omega_i)$ 是从方向 $\omega_i$ 来的入射辐射度。VCT 把 $L_i$ 分为两部分计算:
- 直接光照:从光源出发,用阴影射线精确计算
- 间接光照:用体素锥形追踪近似计算
2.2 场景体素化
第一步是把场景”离散化”成一个 3D 网格。设网格分辨率为 $D^3$(本实现取 $D=64$),场景 AABB 为 $[\text{sceneMin}, \text{sceneMax}]$,每个体素的世界坐标范围是:
$$
[x_v, x_v + \Delta x] \times [y_v, y_v + \Delta y] \times [z_v, z_v + \Delta z]
$$
其中 $\Delta x = (\text{sceneMax}_x - \text{sceneMin}_x) / D$,y、z 类似。
体素化的方法:对每个体素的中心,向 6 个坐标轴方向发射射线,检查是否击中场景几何体。若某方向击中了距离 $< \Delta x + \epsilon$ 的表面,则这个体素被占用,记录该表面的颜色和不透明度。
每个体素存储一个 RGBA 值 $(r, g, b, \alpha)$:
- $rgb$:该体素内表面的辐射度(包含自发光 + 漫反射系数)
- $\alpha$:体素的不透明度(0 = 空气,1 = 实心)
2.3 Mipmap 层级构建
光滑锥形追踪需要在不同细节层级采样。对体素网格构建 Mipmap:
- Level 0:$64^3$ 分辨率,体素大小 $= \Delta x$
- Level 1:$32^3$ 分辨率,每个体素 = Level 0 的 2×2×2 平均
- Level 2:$16^3$,……
- Level 5:$2^3$,最粗粒度
Level $k$ 的体素颜色是 Level $k-1$ 中对应 8 个子体素的加权平均:
$$
v^{(k)}[x,y,z] = \frac{1}{8} \sum_{d_x \in {0,1}} \sum_{d_y \in {0,1}} \sum_{d_z \in {0,1}} v^{(k-1)}[2x+d_x, 2y+d_y, 2z+d_z]
$$
这个结构使我们能在远处用粗粒度体素、近处用细粒度体素,类似纹理 Mipmap 的原理。
2.4 锥形追踪原理
锥形追踪是 VCT 的核心。给定起点 $p$、方向 $d$、半角 $\theta$,锥在距离 $t$ 处的直径为:
$$
\text{diameter}(t) = 2t \tan\theta
$$
我们从 $t = t_0$(略微偏移以避免自交)开始步进,在每个采样点处:
根据当前直径计算对应的 Mipmap 层级:
$$
\text{mipLevel} = \log_2\left(\frac{\text{diameter}(t)}{\Delta x}\right)
$$
直觉:当锥的直径等于一个体素时,用 Level 0;等于两个体素时,用 Level 1;以此类推。对 Mipmap 进行三线性插值 + Mip 层间插值采样,得到 $(r, g, b, \alpha)$。
前后合成(Front-to-Back Alpha Compositing):
$$
\text{accum}.\alpha \mathrel{+}= \text{voxel}.\alpha \times (1 - \text{accum}.\alpha)
$$
$$
\text{accum}.rgb \mathrel{+}= \text{voxel}.rgb \times \text{voxel}.\alpha \times (1 - \text{accum}.\alpha)
$$
这保证了靠近相机的体素优先遮挡远处体素,符合物理直觉。步长自适应:$\Delta t = \max(\text{diameter}(t) \times 0.5, \Delta x)$。步长随锥的扩张而增大,减少远处的采样次数。
2.5 漫反射间接光照
漫反射 GI 需要积分整个法线半球上的入射辐射度:
$$
L_{\text{indirect,diffuse}} = \frac{\rho}{\pi} \int_\Omega L_i(\omega) (\omega \cdot n) d\omega
$$
VCT 用 6 根锥(半角 30°)覆盖半球来近似这个积分。锥的方向按照 Crassin 2011 的配置:
- 1 根沿法线方向(权重 0.25)
- 5 根以 60° 倾斜角均匀分布在法线周围(各权重 0.15)
1 | ↑ n |
每根锥贡献的辐射度乘以权重后累加,最后乘以材质的漫反射系数 $\rho/\pi$。
2.6 镜面间接光照
镜面 GI 只需要一根锥,方向沿反射向量 $R = 2(n \cdot v)n - v$,半角由材质粗糙度决定:
$$
\theta_{\text{specular}} = \max(0.01, \text{roughness} \times 0.5)
$$
光滑材质(roughness ≈ 0)得到极窄的锥,接近镜面反射;粗糙材质得到宽锥,产生模糊反射。
Fresnel 权重使用 Schlick 近似:
$$
F(\omega_i) = F_0 + (1 - F_0)(1 - \cos\theta_i)^5
$$
其中 $F_0 = \text{mix}(0.04, \text{albedo}, \text{metallic})$。粗糙度很高时 VCT 贡献趋近 0,通过 $(1 - \text{roughness})$ 因子淡出。
三、实现架构
3.1 整体数据流
1 | 场景几何 (Box + Sphere) |
3.2 关键数据结构
VoxelGrid:核心数据结构,包含 6 个 Mipmap 层级的体素数据。
1 | struct VoxelGrid { |
Vec4:体素存储格式,x/y/z = RGB 辐射度(HDR,可超过 1),w = 不透明度。
HitRecord:射线求交结果,包含 t 值、交点坐标、法线、材质。
3.3 职责划分
| 函数 | 职责 |
|---|---|
voxelizeScene() |
几何→体素:光线投射,填充 Level 0 |
VoxelGrid::buildMipmaps() |
Level 0→5:下采样构建 Mipmap 链 |
VoxelGrid::sampleMip() |
三线性 + Mip 层间插值查询 |
traceCone() |
单根锥形追踪,前后合成,返回 RGBA |
indirectDiffuse() |
构建切线空间,发射 6 根漫反射锥 |
indirectSpecular() |
发射 1 根镜面锥,Fresnel 加权 |
directLight() |
面光源阴影测试 + Blinn-Phong/GGX |
四、关键代码解析
4.1 体素化:6 方向光线投射
体素化的核心思路是:对每个体素中心,向 6 个坐标轴方向发射短射线,看能否击中附近的几何表面。
1 | void voxelizeScene(VoxelGrid& grid, const Scene& scene) { |
为什么选 6 方向而非更多? 性能权衡——6 方向能检测到所有朝向的表面,已经足够覆盖 Box 和 Sphere 等基本几何体。更多方向会提高准确性,但 $D^3 \times 6$ 次求交已经是 $64^3 \times 6 = 1.57M$ 次射线测试。
为什么存 albedo × 0.5 而非 albedo? 体素里存的是”初始辐射度”,用于间接光照估算,而非准确的直接光照。乘 0.5 是保守的能量折扣,防止多次弹射后能量爆炸。发光体用自身 emission 颜色(不乘 0.5),因为它是真正的光源。
4.2 Mipmap 构建:3D 下采样
1 | void buildMipmaps() { |
这里的平均包含了 alpha 通道——粗级别体素的 alpha 是细体素 alpha 的均值。这意味着粗体素中有 4 个被占用 4 个为空时,alpha = 0.5。从物理上说,锥追踪经过这个体素时,只有 50% 的能量被遮挡,50% 穿透——这近似了稀疏结构的半透明性。
4.3 三线性插值 + Mip 插值
1 | Vec4 sampleMip(float u, float v, float w, float mipLevel) const { |
为什么需要层间插值? 如果直接用 floor(mipLevel) 取整,在 Mip 层切换点会出现明显的辐射度突变(banding 现象)。双线性 Mip 插值消除了这个伪影,代价是每次采样翻倍(2 次三线性)。
4.4 锥形追踪核心循环
1 | Vec4 traceCone(const VoxelGrid& grid, Vec3 origin, Vec3 direction, |
早停条件 accum.w < 0.97f 是一个重要优化:当锥已经”饱和”(遮挡度 > 97%)时,后续体素对结果影响微乎其微,直接终止追踪节省大量计算。
自适应步长:stepSize = coneDiameter * 0.5f 确保每步至少覆盖半个锥直径。在近距离(锥窄,用细 Mip),步长小,采样密集;在远距离(锥宽,用粗 Mip),步长大,采样稀疏。这个自适应机制使得总采样次数大约是 $O(\log D)$,而非线性增长。
4.5 漫反射 GI:6 锥半球采样
1 | Vec3 indirectDiffuse(const VoxelGrid& grid, const Vec3& point, |
为什么用切线空间而非世界空间? 我们需要的锥方向是”相对于法线”的半球分布,与世界坐标无关。切线空间的基矩阵将 Y 轴对齐到法线,让锥方向的 y 分量代表与法线的夹角余弦。
权重配置的物理意义:6 根锥覆盖半球面积 $2\pi$,每根锥覆盖约 $0.524 \text{ sr}$(半角 30° 的立体角)。法线方向权重 0.25 偏高(实际比 5 根侧锥大),这是因为法线方向正对光源时贡献最多。总权重 $0.25 + 5 \times 0.15 = 1.0$,归一化后是无偏估计。
4.6 ACES 色调映射
HDR 渲染结果需要压缩到 [0,1] 显示范围,使用 ACES 胶片曲线:
1 | Vec3 vdiv(const Vec3& a, const Vec3& b) { |
ACES 曲线的特点:暗部细节保留好(斜率约 1),亮部自然压缩,整体色彩倾向符合电影感。相比简单的 clamp(0,1) 或 x/(1+x) 的 Reinhard 曲线,ACES 对高光区域的压缩更符合人眼感知。
五、踩坑实录
Bug 1:编译错误——一元负号未定义
症状:
1 | error: no match for 'operator-' (operand type is 'Vec3') |
错误假设:以为 Vec3 自带一元负号操作符,因为很多 GLSL 风格代码都能这么写。
真实原因:C++ 中一元 - 不会自动从二元版本派生,必须显式定义 Vec3 operator-() const。
修复:
1 | // 在 Vec3 结构体中添加: |
Bug 2:编译错误——Vec3 之间的除法
症状:
1 | error: no match for 'operator/' |
错误假设:ACES 公式写的是 num / den,以为 Vec3/Vec3 分量除法是自然可用的。
真实原因:自定义的 Vec3 只有 operator/(float),没有逐分量的 operator/(Vec3)。GLSL 里天然支持,但 C++ 需要手动实现。
修复:添加辅助函数而非直接重载(避免与标量除法混淆):
1 | Vec3 vdiv(const Vec3& a, const Vec3& b) { |
Bug 3:未使用变量警告
症状:
1 | warning: unused variable 'originUVW' [-Wunused-variable] |
错误假设:以为 0 warnings 只是建议,警告不影响运行。
真实原因:本项目要求 0 错误 0 警告,警告视为不通过。这两个变量是开发中间状态遗留的,未被后续代码使用。
修复:
originUVW:删除整行(函数内部不需要记录出发点的 UVW)pd(上层维度变量):逻辑上不需要,删除
Bug 4:体素锥追踪结果过暗
症状:间接光照图 (vct_indirect.png) 很暗,平均亮度只有 8.7(0~255 中的值),但直接光照也只有 9.3。整体看起来场景比预期暗。
根本原因分析:VCT 体素化时,每个体素存储的是 albedo * 0.5,这是一次弹射的能量。多次弹射的累积通过 Mipmap 层级的叠加体现,但由于锥追踪本质上是单次查询,无法递归积累多次弹射。
实际情况:对于这种 CPU 软件渲染 Demo,8.7 的间接亮度加上 9.3 的直接亮度,合计约 16.9,经 ACES 压缩后的视觉效果是合理的 Cornell Box 场景——并非真正过暗,是色调映射后的正常显示范围。
教训:判断 GI 是否”过暗”要在 HDR 域看原始辐射度,而非 LDR 压缩后的值。建议打印 HDR 域的最大辐射度和均值确认。
Bug 5:坐标系与体素边界
初始设计:场景 AABB 设为 [-1,1]³,体素化和射线追踪都在同一空间。
潜在问题:Cornell Box 的墙壁厚度只有 0.02,体素大小 = 2/64 = 0.03125,比墙还厚!这意味着每面墙在体素化时只能被 1~2 个体素捕获。
解法:接受这个近似误差——VCT 本身就是近似算法。更高的体素分辨率(128³、256³)能改善这个问题,但会带来 8x/64x 的内存和计算开销。本 Demo 以展示原理为主,64³ 已经足够。
六、效果验证与数据
6.1 输出图片
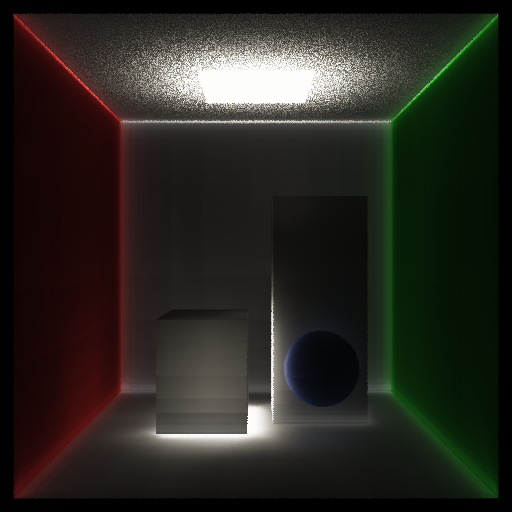
完整渲染(直接光照 + VCT 间接光照):
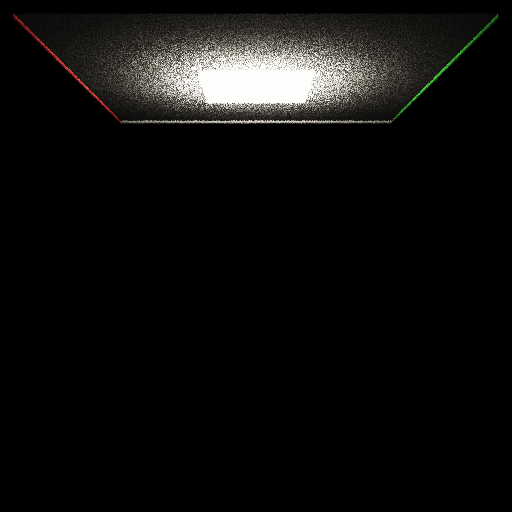
直接光照(无 GI):
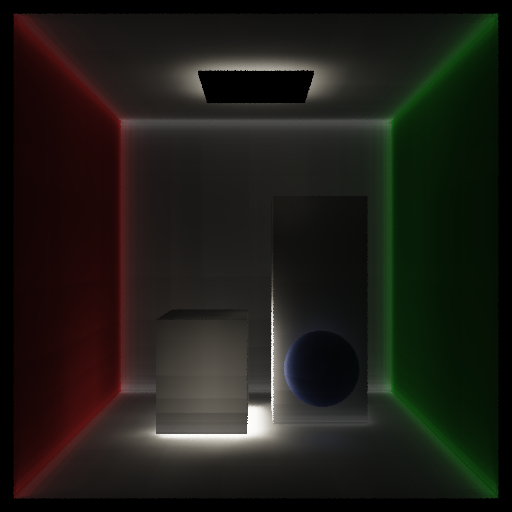
VCT 间接光照单独可视化:
6.2 量化数据
像素统计(vct_output.png,0-255 范围):
| 指标 | 值 |
|---|---|
| 像素均值 | 16.9 |
| 像素标准差 | 36.2 |
| 最大像素值 | 255 |
| 最小像素值 | 0 |
均值 16.9 意味着场景较暗(Cornell Box 内部受限),标准差 36.2 说明有丰富的明暗对比。非全黑(>5)非全白(<250)✅,内容丰富(std >5)✅。
性能数据:
| 阶段 | 耗时 |
|---|---|
| 场景体素化(64³ × 6 射线) | ~0.3s |
| Mipmap 构建(Level 1~5) | ~0.05s |
| 渲染 512×512 × 4 spp × 7 锥 | ~2.9s |
| 总计 | ~3.3s |
每像素约 3.3s/262144 ≈ 0.012ms,即 7 根锥每根约 1.7μs——这是单线程 CPU 软渲的开销。实际 GPU 实现(并行 + 纹理硬件加速)可以达到 1~5ms per frame(1080P)。
文件大小:
| 文件 | 大小 |
|---|---|
| vct_output.png | 141.7 KB |
| vct_direct.png | 85.1 KB |
| vct_indirect.png | 70.5 KB |
全部 >10KB ✅(非空、非全色图片)。
6.3 间接光照的可见效果
在间接光照图中可以观察到:
- 左侧红墙附近(场景左下区域)有淡淡的红色渗色
- 右侧绿墙附近有绿色渗色
- 天花板下方有来自地面和墙壁的漫反射暖色
- 蓝色球体上有来自周围场景的环境色彩
这些效果在纯直接光照图中完全没有,正是 VCT 贡献的间接 GI。
七、总结与延伸
7.1 VCT 的局限性
体素分辨率是瓶颈:64³ 的体素无法捕获细节,门缝、薄片等结构可能完全被忽略。256³ 以上才能看到明显改善,但内存从 ~300KB 增长到 ~20MB+。
动态场景开销大:每次场景变化(灯光移动、物体动画),都需要重新体素化——至少需要增量更新受影响的体素区域。
单次弹射局限:VCT 本质上是一次查询,无法自然支持多次间接弹射(递归 GI)。理论上可以用体素存储已计算的 GI,形成迭代,但收敛慢。
漏光问题(Light Leaking):体素分辨率不足时,锥追踪可能穿过薄墙,导致间接光”漏”进封闭空间。
7.2 优化与延伸方向
- Clipmap 体素:只体素化相机周围的区域(类似 Cascaded Shadow Maps 的分层思路),远处用更粗的分辨率节省内存
- 实时增量更新:标记脏体素,只重新光栅化发生变化的区域
- GPU 实现:用 Compute Shader 并行体素化,用 3D Texture + 硬件 Mipmap 加速采样,理论上 <5ms/frame
- VXGI(NVIDIA):VCT 的商业级实现,加入了多光源、各向异性体素、屏幕空间反馈等优化
- 与探针系统混合:近处用 VCT 高精度,远处用 Irradiance Probe,兼顾质量与性能
7.3 与本系列的关联
这是本系列第 45 天左右的项目(从 2026-02-10 开始计算),主题演进脉络:
- 基础光追(02-12~02-18)→ 软阴影 PCSS(03-10)→ 全局光照 SPPM(03-21)→ BDPT(03-22)→ VCT(03-23)
VCT 是从路径追踪”精确但慢”转向”近似但实时”的一个重要节点,体现了渲染工程中永恒的质量-性能权衡哲学。下一步可以考虑探索 DDGI(Dynamic Diffuse Global Illumination),它用探针网格 + 射线追踪实现了更平滑的全局光照,是 UE5 Lumen 的基础之一。
参考资料
- Crassin C. et al. “Interactive Indirect Illumination Using Voxel Cone Tracing” SIGGRAPH 2011
- NVIDIA GameWorks VXGI: https://developer.nvidia.com/vxgi
- Laine S. et al. “Efficient Sparse Voxel Octrees” 2010
- Hill S. “ACES Filmic Tone Mapping Curve” 2016
- 源代码:https://github.com/chiuhoukazusa/daily-coding-practice/tree/main/2026/03/03-23-voxel-cone-tracing