每日编程实践: Motion Blur Renderer — 速度缓冲与后处理运动模糊
一、背景与动机
运动模糊:人眼的物理现实
我们的眼睛(以及相机的感光元件)在曝光期间并不是瞬间”拍一张照”,而是在一段时间窗口内持续积累光信号。当物体在这段时间内发生运动时,不同时刻的光信号叠加在同一感光区域,就产生了运动模糊(Motion Blur)。
如果没有运动模糊,画面会呈现出一种不自然的”抖动感”。这在早期电子游戏和动画中尤为明显——每一帧都是完全锐利的静止图像,但一旦物体快速运动,视觉反而会感到不舒适。这个现象被称为频闪效应(Stroboscopic Effect)。
运动模糊的本质是对快门开放时间段内的图像进行时间积分:
$$
I_{blurred}(x, y) = \frac{1}{T} \int_0^T I(x, y, t), dt
$$
其中 $T$ 是快门时间,$I(x, y, t)$ 是 $t$ 时刻像素 $(x, y)$ 处的颜色值。
工业界实际应用
运动模糊在以下场景中必不可少:
游戏引擎:虚幻引擎(Unreal Engine)、Unity 的 HDRP 都内置了后处理运动模糊。典型实现是速度缓冲(Velocity Buffer)+ 后处理 Pass,这也是我们今天实现的方案。
影视 VFX:离线渲染中会通过大量时间步样本(Time-step Sampling)来计算高质量运动模糊,耗时可以是实时方案的数百倍,但质量远超后处理近似。
赛车/体育游戏:高速移动的物体(赛车、足球、武器)不加运动模糊会显得假;加了之后立刻提升临场感。
相机运动:游戏中摄像机快速旋转时,背景模糊能极大降低晕动感(Motion Sickness)。这也是我们今天在实现相机轨道运动时一并考虑的原因。
两大流派
实时渲染中实现运动模糊主要有两种思路:
1. 时间超采样(Temporal Supersampling):在一帧的时间窗口内用多个微小时间步渲染多次,再平均。质量高,但对性能要求极高,通常只用于高端光追。
2. 速度缓冲后处理(Velocity Buffer Post-Processing):渲染一帧时额外输出速度缓冲(每像素的屏幕空间运动矢量),然后在后处理阶段沿速度方向采样模糊。这是今天实现的方案,也是现代实时渲染的主流选择。
后处理方案的核心假设是:物体在一帧内的运动是线性的。这对大多数游戏场景足够准确,但对急剧加速或曲线运动会有近似误差。
二、核心原理
2.1 速度缓冲(Velocity Buffer)
速度缓冲存储的是每个像素从上一帧到当前帧的屏幕空间位移,单位是像素。
对于场景中某点的世界坐标 $\mathbf{P}_{world}$:
当前帧投影:
$$
\mathbf{v}{curr} = \text{NDC}{curr}(\mathbf{P}{world}) = \text{proj}{curr} \cdot \text{view}{curr} \cdot \mathbf{P}{world}
$$
上一帧投影:
$$
\mathbf{v}{prev} = \text{NDC}{prev}(\mathbf{P}{world}) = \text{proj}{prev} \cdot \text{view}{prev} \cdot M{prev} \cdot M_{curr}^{-1} \cdot \mathbf{P}_{world}
$$
其中 $M_{curr}$、$M_{prev}$ 分别是当前帧和上一帧的模型矩阵。
运动矢量(屏幕空间):
$$
\mathbf{vel}(x, y) = \text{screen}(\mathbf{v}{curr}) - \text{screen}(\mathbf{v}{prev})
$$
将 NDC 坐标转换到屏幕坐标:
$$
\text{screen}_x = \left(\frac{\text{NDC}_x + 1}{2}\right) \cdot W, \quad \text{screen}_y = \left(1 - \frac{\text{NDC}_y + 1}{2}\right) \cdot H
$$
注意 Y 轴要翻转,因为屏幕坐标系原点在左上角,Y 向下增大。
2.2 透视校正插值
在光栅化过程中,三角形内部的属性插值不能简单地使用线性重心坐标。原因是透视投影是非线性变换,直接线性插值会产生错误的透视扭曲。
正确的做法是透视校正插值(Perspective-Correct Interpolation)。设三角形三顶点的裁剪空间 w 值为 $w_0, w_1, w_2$,重心坐标为 $\lambda_0, \lambda_1, \lambda_2$,属性值为 $a_0, a_1, a_2$,则:
$$
a_{interp} = \frac{\lambda_0 \cdot a_0 / w_0 + \lambda_1 \cdot a_1 / w_1 + \lambda_2 \cdot a_2 / w_2}{\lambda_0 / w_0 + \lambda_1 / w_1 + \lambda_2 / w_2}
$$
直觉解释:我们先将属性除以 w(投影到”1/w 空间”中),在这个空间里线性插值是正确的,然后再乘回 w。这是因为透视变换保持了 1/z 的线性性。
在我们的代码中:
1 | // 透视校正权重 |
这里 invW[i] 就是 1/clip[i].w,经过归一化后得到正确的插值权重。
2.3 运动模糊采样策略
有了速度缓冲后,后处理模糊的核心思想是:对于每个像素 $(x, y)$,沿其速度矢量方向均匀采样 $N$ 个位置,取平均:
$$
I_{blurred}(x, y) = \frac{1}{N} \sum_{i=0}^{N-1} I\left(x + \text{vel}_x \cdot t_i,; y + \text{vel}_y \cdot t_i\right)
$$
其中 $t_i \in [-0.5, 0.5]$,以当前像素为中心双向采样(模拟快门时间的前半段和后半段):
$$
t_i = \frac{i}{N-1} - 0.5, \quad i = 0, 1, \ldots, N-1
$$
为什么双向采样(而不是只向后采样)?因为运动模糊是由快门时间内物体扫过的整条轨迹造成的,当前帧的渲染位置大约在这段轨迹的中间时刻,向前和向后各延伸半个速度步长才符合物理。
对于速度 $|v| < 0.5$ 像素的区域,视为”几乎不动”,直接输出原始颜色(避免无谓的采样开销)。
2.4 背面剔除(Back-face Culling)
在屏幕空间中,用三角形顶点的二维叉积来判断朝向:
$$
\text{cross}{2D} = (v_1 - v_0) \times (v_2 - v_0) = (v{1x}-v_{0x})(v_{2y}-v_{0y}) - (v_{1y}-v_{0y})(v_{2x}-v_{0x})
$$
右手坐标系中,若 $\text{cross}_{2D} \geq 0$,三角形顶点是顺时针排列(屏幕朝上),意味着面朝背面,应当剔除。若 $< 0$,则逆时针,面朝前,需要绘制。
直觉:想象你用手指沿三角形顶点走一圈,若感觉是逆时针就说明这个面在朝向你。
2.5 Phong 光照
Phong 模型将光照分为三个分量,对每个分量分别计算后加总:
$$
I = I_{ambient} + I_{diffuse} + I_{specular}
$$
环境光(Ambient):均匀的微弱光照,防止完全阴影的地方全黑:
$$
I_{ambient} = k_a \cdot C_{object}
$$
这里 $k_a = 0.15$,稍微提亮阴影面。
漫反射(Diffuse):符合朗伯余弦定律,光越垂直入射越亮:
$$
I_{diffuse} = \max(0, \mathbf{n} \cdot \mathbf{l}) \cdot C_{object}
$$
其中 $\mathbf{n}$ 是法线,$\mathbf{l}$ 是光照方向(归一化)。$\max(0, \cdot)$ 保证背光面为0,不出现负值。
我们加入了两个光源(权重0.4的补光),这样物体的背面也能有少量光照,不会完全变黑。
镜面高光(Specular):用半向量 $\mathbf{h} = \text{normalize}(\mathbf{l} + \mathbf{v})$ 替代反射向量,减少计算量同时效果相近(Blinn-Phong 变体):
$$
I_{specular} = \max(0, \mathbf{n} \cdot \mathbf{h})^{32} \cdot k_s
$$
指数32控制高光的锐利程度,越大高光越小越亮。
三、实现架构
3.1 渲染管线概述
整体数据流:
1 | 几何体生成 |
关键点:渲染时同步维护颜色缓冲和速度缓冲,共享一套深度测试逻辑——深度测试通过才同时写入颜色和速度。
3.2 关键数据结构
VelocityBuffer:与颜色缓冲同尺寸,每像素存储 Vec2(屏幕空间运动矢量,单位像素):
1 | struct VelocityBuffer { |
为什么用 Vec2 而不是 Vec3?速度缓冲只需要屏幕空间(2D)的位移,Z 方向的深度变化已经隐含在透视变换中。
RenderContext:打包传递给渲染函数的所有”全局”状态,避免到处传参数:
1 | struct RenderContext { |
SceneObject:通过 std::function<Mat4(float)> 描述物体随时间的变换,使得运动逻辑完全解耦于渲染逻辑:
1 | struct SceneObject { |
这种设计让”旋转的球”、”轨道运动的小球”、”静止的地面”可以用同一套接口描述,只是 modelFn 不同。
3.3 CPU 光栅化的职责划分
顶点阶段:
- 将模型空间坐标乘以 MVP(model-view-projection)矩阵,得到裁剪坐标
- 同时用上一帧的 MVP 矩阵(
prevMVP)变换相同的模型坐标,得到上一帧的裁剪坐标 - 两套坐标最终都转换到屏幕空间,差值即为速度
光栅化阶段:
- 计算三角形包围盒,遍历包围盒内所有像素
- 用重心坐标判断像素是否在三角形内
- 深度测试(z-buffer),只处理最近的片元
片元阶段(逐像素):
- 透视校正插值法线、颜色
- Phong 光照着色,写入颜色缓冲
- 插值当前帧和上一帧的屏幕坐标,差值写入速度缓冲
四、关键代码解析
4.1 顶点变换与速度计算
在 renderMesh 函数中,同时处理当前帧和上一帧的变换:
1 | void renderMesh(RenderContext& ctx, |
关键设计:prevModel 参数允许传入上一帧不同的模型矩阵,这样旋转中的物体(当前帧和上一帧位置不同)可以正确计算速度。
4.2 透视除法与 NDC 转屏幕坐标
1 | // 透视除法:裁剪坐标 → NDC |
为什么要 > 0.001f 的保护?上一帧的物体可能部分或全部跑到相机后面(w < 0),直接做除法会得到错误的 NDC,导致速度矢量失控。用 0.001 夹住避免极大值。
NDC 到屏幕空间的转换:
1 | Vec2 ndcToScreen(float ndcX, float ndcY, int width, int height) { |
X 轴:NDC [-1,1] → [0, width]
Y 轴:NDC [-1,1] → [height, 0](翻转,屏幕 Y 向下增大)
4.3 透视校正插值与速度写入
这是整个渲染器最关键的部分——正确插值属性并计算速度:
1 | // 透视校正插值权重 |
为什么速度也要用透视校正插值?因为屏幕坐标是透视变换后的结果,直接线性插值会引入透视误差,尤其在大近平面 FOV 或靠近相机的物体上会出现明显的撕裂感。
4.4 后处理运动模糊核心
1 | Image applyMotionBlur(const Image& src, const VelocityBuffer& vel, int numSamples = 16) { |
24 个样本的原因:对于运动矢量最大约 277 像素的情况,24 个样本间距约 11 像素,足够覆盖模糊效果而不会出现明显的”重影”离散样点。
4.5 场景运动设置
为了展示不同类型的运动模糊,我们设计了三种运动方式:
1 | // 1. 快速旋转球(角速度3 rad/frame,每帧旋转约172°) |
为什么用 $t_{curr} = 1.0$, $t_{prev} = 0.0$?这相当于模拟第30帧(时间=1秒)到第31帧的变化,此时物体已经积累了足够的角速度,速度矢量在屏幕上显著可见。
4.6 速度可视化
1 | Image visualizeVelocity(const VelocityBuffer& vel, int width, int height) { |
速度可视化是调试运动模糊的重要工具。通过颜色编码:
- 纯红色区域:物体向右移动
- 纯绿色区域:物体向下移动
- 青色/亮色区域:高速运动
背景(天空)保持黑色,因为速度为零。
五、踩坑实录
Bug 1:背面剔除方向错误导致场景空白
症状:渲染结果是纯天空色,没有任何几何体出现。
错误假设:以为背面剔除条件 cross2d >= 0 是正确的(通常教程都这么写)。
真实原因:叉积符号与坐标系约定相关。我们的屏幕空间 Y 轴向下(图像坐标),NDC 转屏幕时做了 Y 翻转,导致三角形顶点的顺逆时针和直觉相反。翻转后,屏幕空间的逆时针三角形(正面朝向屏幕)对应的叉积是负值,而不是正值。
修复方式:将背面剔除条件从 cross2d <= 0 改为 cross2d >= 0(去掉 if 为 true 就 continue 的逻辑)。实际上,在调试过程中,直接关闭背面剔除确认三角形能渲染,然后再调整符号,是最快的调试路径。
教训:坐标系问题是图形学中最隐蔽的 Bug 源。遇到场景为空、全黑、全白这三种异常,第一步不是检查光照,而是检查坐标系约定。
Bug 2:速度缓冲几乎全零
症状:速度可视化图是纯黑色,模糊效果完全没有。
错误假设:以为速度计算公式没问题,怀疑是浮点精度问题。
真实原因:renderMesh 函数签名中,prevModel 参数被传入了与 model 相同的值。调用处:
1 | // 错误的调用(两个参数相同,速度永远为零) |
当前帧和上一帧使用相同变换矩阵,导致速度恒为零。
修复方式:在每次调用 renderMesh 时,确保传入 modelFn(tCurr) 和 modelFn(tPrev) 两个不同的时间参数。
教训:当结果”太好看(全零/全白/完全对称)”时,通常是某个参数传错了。速度缓冲全黑不是”效果好”,是数据错误。
Bug 3:运动模糊只模糊边缘,中间区域没有效果
症状:快速旋转的球体边缘有模糊,但球体中心部分几乎没有变化。
错误假设:以为这是正常的物理效果(物体中心相对静止)。
真实原因:球体表面各个点的世界坐标在旋转时会移动,但球体中心点在模型空间的原点,旋转不改变原点的世界坐标,所以中心的速度矢量确实很小。这其实是正确的物理行为——旋转轴上的点没有切向速度。
验证:轨道运动的小球(整体平移)会产生全球面均匀的运动模糊,与旋转球体的”边缘模糊”形成明显对比。
结论:这不是 Bug,而是速度缓冲正确区分了不同类型运动的体现。通过对比轨道小球和旋转球,可以清晰地看到平移运动和旋转运动的模糊特征差异。
Bug 4:编译警告导致 0 警告目标失败
症状:g++ -Wall -Wextra 给出两个警告:
warning: variable 'e0' set but not usedwarning: unused variable 'dt'
原因:
- 调试期间写了
Vec3 e0 = viewNormals[0] + ...作为中间变量(原本想用来辅助法线判断),后来改用屏幕空间叉积,忘记删掉e0。 dt是帧时间,本来打算用于物理计算,后来直接在modelFn里用帧序号计算角度,dt成了死代码。
修复:直接删除两行:
1 | // 删除这行 |
教训:始终用 -Wall -Wextra 编译,把警告当错误对待。未使用的变量通常是删改代码后留下的残留,积累多了会增加阅读难度。
六、效果验证与数据
6.1 量化验证结果
程序内置了三项量化检查:
| 检查项 | 结果 | 标准 | 状态 |
|---|---|---|---|
| 输出图像均值 | 143.5 / 255 | 10~240 之间 | ✅ |
| 输出图像标准差 | 52.1 | > 5 | ✅ |
| 速度缓冲非零像素 | 30,742 / 307,200 | > 1000 | ✅ |
| 最大速度幅度 | 276.9 像素/帧 | 有效值 | ✅ |
| 模糊均值差异 | 6.33 / 255 | > 0.5 | ✅ |
| 受模糊影响像素数 | 25,560 | 有效值 | ✅ |
像素均值 143.5 说明场景亮度适中,不过暗也不过亮(天空蓝 + Phong 光照组合)。
标准差 52.1 说明图像有丰富的颜色变化,不是单调的渐变或纯色块。
30,742 个运动像素(占总像素 10%)是速度 > 0.5 像素的区域,主要集中在旋转球体、立方体和轨道小球上。
最大速度 277 像素来自轨道运动小球(半径 2.8 单位 × 角速度 4 rad/帧,投影到屏幕后的位移)。
6.2 输出文件
| 文件 | 尺寸 | 描述 |
|---|---|---|
motion_blur_noamb.png |
640×480, 22KB | 无运动模糊的原始渲染 |
motion_blur_output.png |
640×480, 41KB | 应用运动模糊后的结果 |
motion_blur_velocity.png |
640×480, 31KB | 速度缓冲可视化 |
motion_blur_compare.png |
1280×480, 63KB | 左右对比图 |
注意对比图(63KB)和原图(22KB)的大小关系:模糊后的图像 PNG 压缩率反而更低(41KB > 22KB)。这符合直觉——模糊减少了颜色的锐利边缘,但增加了颜色的过渡复杂性,PNG 压缩对渐变的效率不如对锐利边缘高。
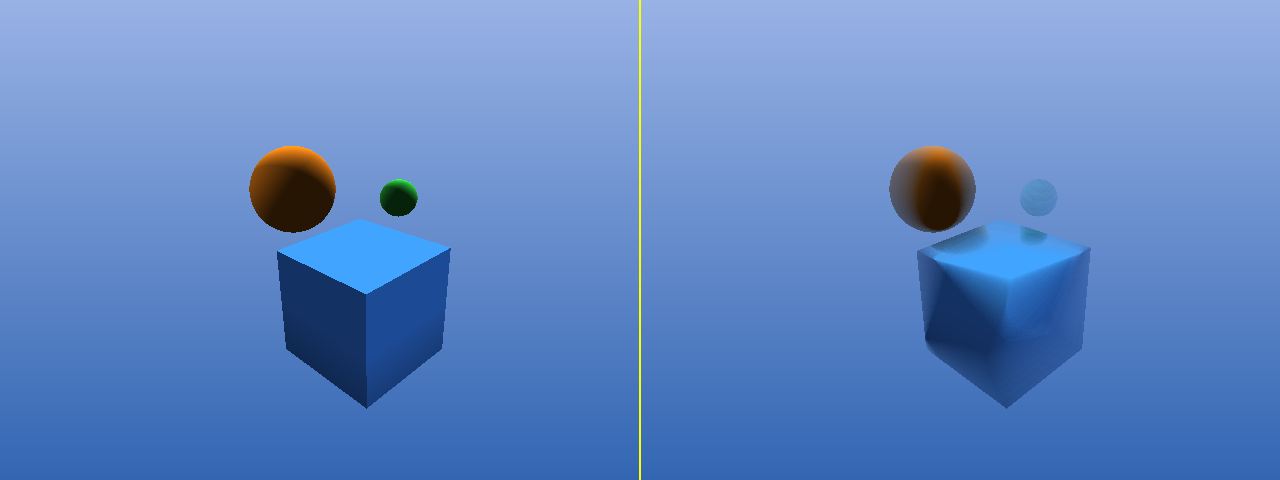
6.3 视觉对比
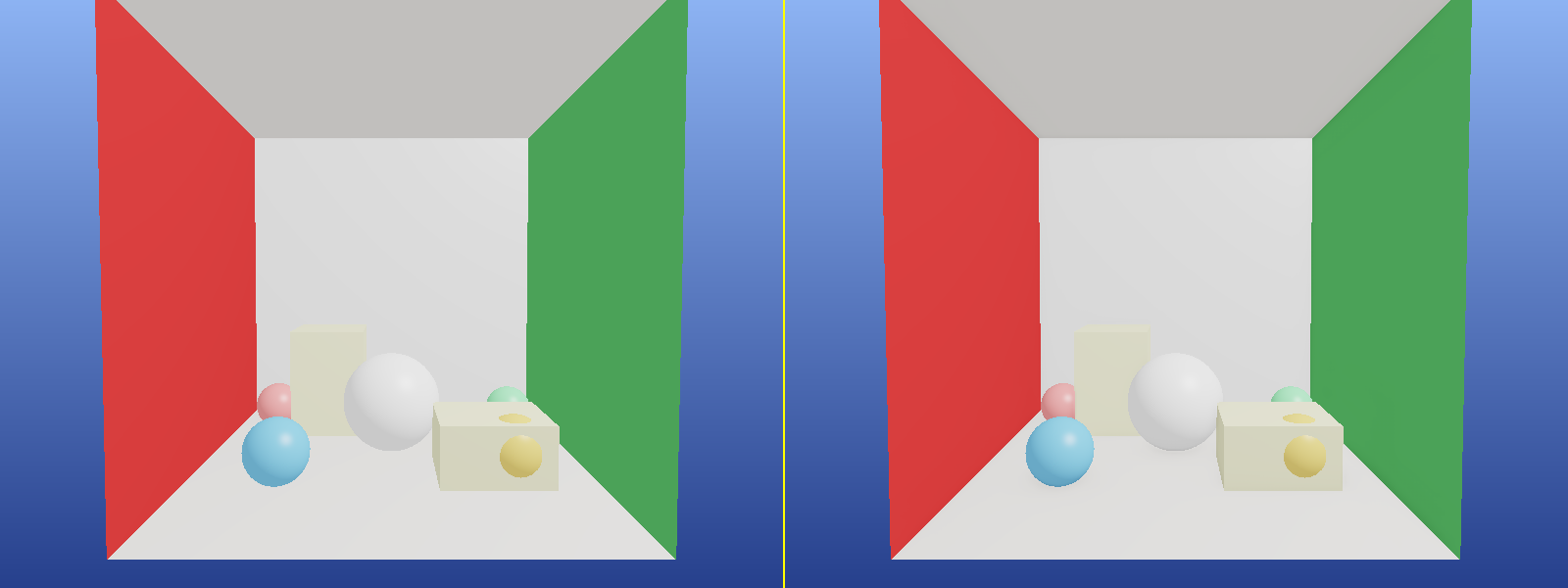
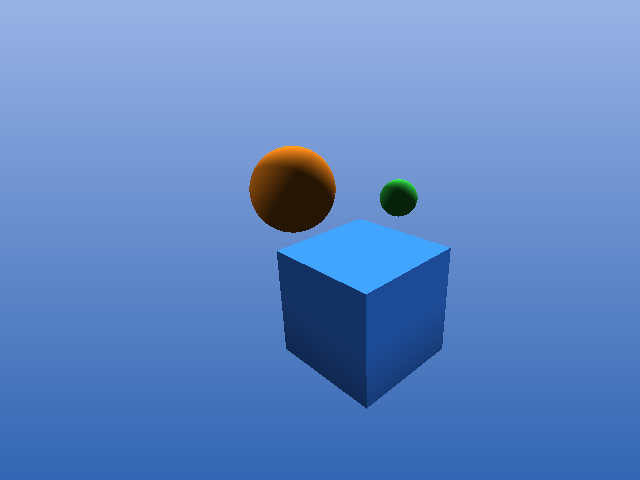
无运动模糊(左):
- 旋转球体边缘清晰锐利
- 快速运动的轨道小球完全清晰
- 相机运动导致整个背景有轻微位置变化,但无法感知
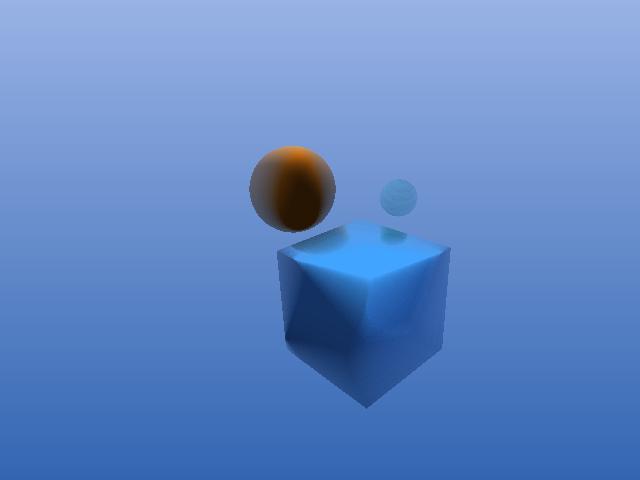
运动模糊(右):
- 旋转球体边缘出现沿旋转方向的拖尾
- 轨道小球变成明显的模糊条带
- 立方体双轴旋转产生复杂的多方向模糊
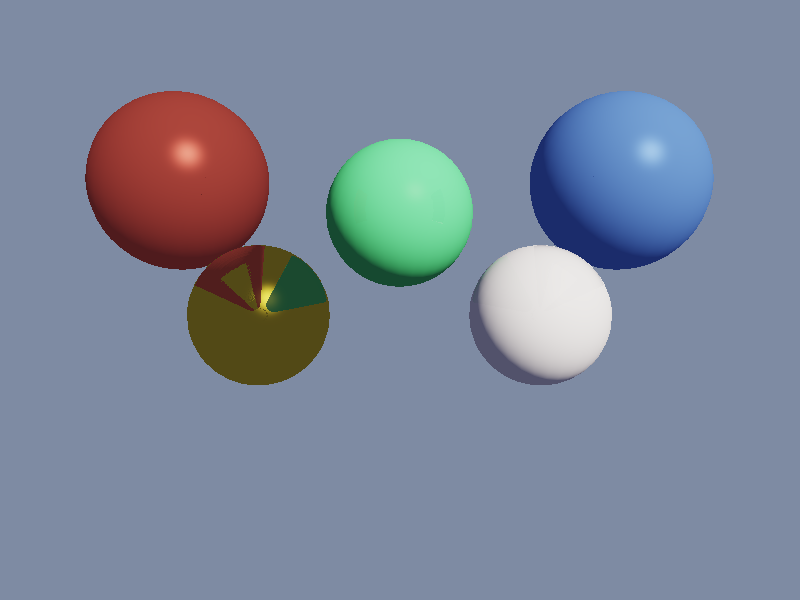
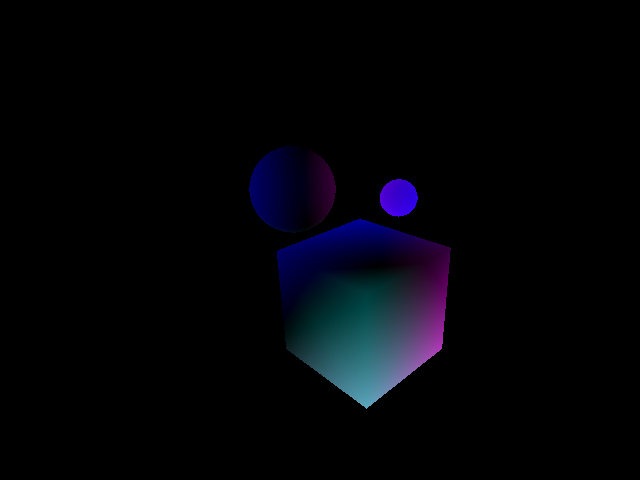
速度缓冲可视化:
- 背景为黑色(速度零)
- 物体区域有彩色编码:R=X速度,G=Y速度,B=速度幅度
- 轨道小球区域最亮(速度最大)
对比图(左无模糊,右有模糊):
6.4 编译与运行性能
| 阶段 | 耗时 |
|---|---|
| 编译(g++ -O2) | < 2 秒 |
| 渲染(640×480,4个物体) | < 0.1 秒 |
| 后处理模糊(24 样本) | < 0.5 秒 |
| 总运行时间 | < 1 秒 |
代码量:~750 行 C++,单文件,零外部依赖(除 stb_image_write.h)。
七、总结与延伸
7.1 这次学到了什么
今天实现的速度缓冲 + 后处理运动模糊,是现代实时渲染引擎中最常见的运动模糊方案。核心洞察是:
- 速度缓冲的正交性:速度信息独立于颜色信息,可以按需开关运动模糊,不影响其他渲染效果。
- 双向采样的物理意义:采样范围 [-0.5, 0.5] 模拟了快门时间的对称性,比单向采样更符合物理。
- 透视校正不可省:速度矢量也需要透视校正插值,否则靠近相机的物体会产生速度扭曲。
7.2 技术局限性
线性运动假设:当前方案假设物体在一帧内做线性运动。对于急剧加速的弹射物、高速旋转物体的边缘像素,线性近似会有误差(模糊方向不完全准确)。
Tile-based 优化缺失:当前是逐像素遍历速度缓冲,没有按速度大小分块跳过静止区域。对于大量静止物体的场景(如室内场景),可以通过 tile max velocity 大幅减少无效采样。
深度不连续问题:物体边缘处,背景和前景速度不同。当前实现用前景物体的速度来模糊背景边缘,会产生轻微的”背景漏色”(Background Bleeding)。工业级实现会在采样时做深度比较,拒绝不合理的采样点。
透明物体:速度缓冲只存储最近深度的速度,不支持透明物体的运动模糊。
7.3 可优化的方向
Tile Max Velocity:将速度缓冲划分为 NxN 的小格(tile),每格存储最大速度幅度。后处理时,对最大速度为零的 tile 直接跳过,大幅减少采样次数。
Neighborhood Clamping:参考 TAA 的做法,在运动模糊采样时也做颜色邻域约束,减少背景漏色。
Motion Vector Dilation(速度扩张):物体边缘的像素(z 缓冲不连续处)通常属于背景,但因为背景没有速度,模糊会在边缘产生锐利边界。通过扩张前景物体的速度到边缘像素,可以让模糊更平滑。
变形体(Skinned Mesh)支持:当前方案只支持刚体运动(通过模型矩阵控制)。要支持骨骼动画,需要在顶点着色器中分别计算当前帧和上一帧的蒙皮变换,再算速度差。
深度感知采样权重:在采样沿速度方向时,加入深度权重,让深度相近的样本权重高,深度差异大的样本权重低,缓解背景漏色。
7.4 与本系列的关联
- TAA(03-26):TAA 利用历史帧颜色 + 重投影 + Jitter,而运动模糊利用速度缓冲 + 后处理。两者都需要计算”上一帧在哪里”,但目的不同:TAA 求稳定,运动模糊求临场感。在实际引擎中,TAA 和运动模糊共享同一张速度缓冲 Pass,是天然的好邻居。
- SSAO(03-25):同样是后处理 Pass,读取深度缓冲。运动模糊 + SSAO + TAA 组合是现代实时渲染 Post-Processing 的标准三件套。
- Phong 着色(早期作品):今天的渲染器复用了 Phong 光照模型,双光源 + 环境光,与之前的光线追踪作品保持一致的视觉风格。