每日编程实践: Caustics Renderer — 光子映射焦散渲染
每日编程实践:Caustics Renderer — 光子映射焦散渲染
今天的项目是用**光子映射(Photon Mapping)算法渲染焦散(Caustics)**效果——玻璃球折射光线在漫反射地板上形成的亮斑图案。这是计算机图形学中最经典且最难正确实现的效果之一,纯路径追踪需要极长时间才能收敛,而光子映射可以在有限时间内产生可辨识的焦散图案。
一、背景与动机
什么是焦散?
焦散(Caustics)是光线通过折射或反射介质后聚焦在漫反射表面形成的亮斑。游泳池底部的波纹光斑、玻璃杯旁的彩色光圈、钻石的内部闪烁——都是焦散现象。
从物理角度看,焦散是辐照度场的高频信息:光子从光源出发,通过玻璃的斯涅尔折射改变方向,最终在某块漫反射地面上”聚堆”,该区域接收到的光通量远高于周围,形成明亮的光斑。
为什么纯路径追踪很难渲染焦散?
想用路径追踪渲染焦散,渲染器需要从相机出发,击中地板,然后经历以下路径才能采样到焦散贡献:
1 | 相机 → 地板 → 玻璃球(进入)→ 玻璃球(离开)→ 光源 |
这条路径称为 LS²DE 路径(Light-Specular-Specular-Diffuse-Eye)。问题在于:
- 路径追踪从相机端往回追,通过漫反射地板弹射一条随机方向的光线
- 该光线偶然命中玻璃球,再折射出去后,还必须精确地朝向光源
- 光源是点光源,立体角趋向于零
- 这条特定路径的概率密度极低,需要数百万个样本才能偶然采样到几次焦散
用双向路径追踪(BDPT)或 Metropolis 可以改善,但实现复杂。光子映射则通过”把光子存下来”彻底解决了这个问题。
工业界的实际应用
- 电影级渲染:Arnold、RenderMan 都有光子映射/VCM 算法模块,专门处理焦散
- 游戏实时渲染:RTX 实时光线追踪(如 Cyberpunk 2077 的 Path Tracing 模式)通过降噪网络近似焦散
- 珠宝/建筑可视化:焦散是展示钻石切割质量的关键视觉要素,光子映射是行业标准
- Blender Cycles:使用 BDPT + 光子映射的混合算法处理焦散场景
二、核心原理
2.1 斯涅尔折射定律
当光线从折射率为 n₁ 的介质进入折射率为 n₂ 的介质时,折射方向由斯涅尔定律决定:
1 | n₁ × sin(θ₁) = n₂ × sin(θ₂) |
其中 θ₁ 是入射角,θ₂ 是折射角(均相对于法线方向)。
直觉解释:光线在密度更高的介质中”走得更慢”,就像在水中的声波,波速降低导致波前弯折。折射率 n = c / v,其中 c 是真空光速,v 是介质中的光速。玻璃 n≈1.5,意味着光在玻璃中的速度是真空的 2/3。
向量形式推导:设入射方向单位向量为 d̂,界面法线为 n̂(朝向入射侧),折射率之比 η = n₁/n₂,则折射方向为:
1 | cos θ₁ = -d̂ · n̂ |
若 sin²θ₂ > 1,则发生全反射,没有折射光线。
折射方向向量:
1 | t̂ = η × d̂ + (η × cos θ₁ - cos θ₂) × n̂ |
代码实现:
1 | bool refract(const Vec3& d, const Vec3& n, double eta, Vec3& refracted) { |
注意 eta 这里传入的是 n₁/n₂(从外部进入玻璃时 = 1/1.5 ≈ 0.667,从玻璃出来时 = 1.5)。
2.2 菲涅尔反射(Schlick 近似)
真实的玻璃既有折射也有反射,两者的比例由菲涅尔方程决定:
1 | F(θ) = F₀ + (1 - F₀) × (1 - cos θ)^5 |
其中 F₀ = ((n₁-n₂)/(n₁+n₂))² 是法线入射时的反射率。
直觉解释:
- 垂直入射(θ≈0)时,玻璃反射很少(∼4%),大部分光透过去
- 掠射(θ接近90°)时,反射率趋向100%,就像看水面反射天空时需要低头
Schlick 近似精度相当高,而且只需要一行代码:
1 | double schlick(double cosine, double ref_idx) { |
在蒙特卡洛追踪中,用概率选择折射还是反射(重要性采样),而不是把能量分成两份:
- 以概率 F 做反射(乘以 F 修正权重)
- 以概率 1-F 做折射(乘以 1-F 修正权重)
这样每条光子路径只走一条路,但统计上正确。
2.3 光子映射算法概述
光子映射由 Henrik Wann Jensen 于 1996 年提出,分为两个独立的 Pass:
Pass 1 - 光子追踪:
- 从光源出发,发射 N 条光子
- 每个光子携带能量 P = 总功率 / N
- 光子在场景中弹射,遇到玻璃就折射/反射(携带能量)
- 遇到漫反射面时,存储光子(位置、方向、能量)
- 用俄罗斯轮盘赌(Russian Roulette)决定是否继续漫反射传播
- 所有存储的光子构成”光子图”
Pass 2 - 渲染:
- 从相机出发发射光线
- 命中漫反射面时,查询该点附近 k 个最近光子
- 用核函数(这里用圆形区域)做密度估计:其中 Φᵢ 是第 i 个光子的能量,r 是最远那个光子的距离(自适应半径),f_r 是 BRDF
1
L_caustics(x) ≈ Σᵢ f_r(x) × Φᵢ / (π × r²)
为什么 Pass 1 能捕获焦散?
光子从光源出发,经玻璃折射后落在地板上——这正是焦散的定义路径(LS⁺DE 类型)。传统路径追踪从眼睛端追的时候很难偶然走到这条路径,但光子映射的 Pass 1 自然地就追踪了它。
2.4 KD-Tree 近邻搜索
光子图中有 30 万个光子,每帧渲染时每个漫反射点都要找最近的 60 个光子。暴力枚举是 O(N×M),太慢。
KD-Tree(k-维树)是一种二叉空间分割树:
- 每个节点对应一个子空间
- 按坐标轴(循环 x/y/z)的中值分割
- 叶节点存储光子索引
- 查询时,先检查分割平面哪侧,再根据球心到平面的距离决定是否递归另一侧
最近邻查询的平均复杂度从 O(N) 降到 O(√N),实测快几十倍。
三、实现架构
3.1 整体数据流
1 | 光源 |
3.2 关键数据结构
1 | // 光子:光子图中的基本单元 |
与传统 KD-Tree(每个节点存储指针)不同,这里用隐式索引数组表示树结构:根在中间,左子树在 [start, mid),右子树在 (mid, end]。这种布局对缓存更友好,避免大量指针追踪。
3.3 渲染器分工
| 组件 | 职责 |
|---|---|
tracePhoton() |
Pass 1:单个光子的完整弹射路径 |
KDTree::build() |
构建空间索引(Pass 1 结束后执行一次) |
KDTree::estimate() |
给定位置和半径,返回焦散辐照度 |
directLight() |
直接光照(带软阴影,玻璃遮挡部分透过) |
renderPixel() |
相机光线 → 着色(直接光 + 焦散 + 弹射) |
main() |
调度两个 Pass,色调映射,输出文件 |
四、关键代码解析
4.1 光子发射:锥形采样指向玻璃球
不是从光源向全方向发射光子(浪费在不经过玻璃球的方向上),而是向玻璃球方向的锥形区域采样:
1 | // 锥形半角 45° |
为什么 cosTheta = 1 - u(1-cosMax)?*
均匀采样锥体时,需要按立体角均匀,而立体角元 dΩ = sin θ dθ dφ。对 cosθ 均匀采样(而不是对 θ 均匀采样)等价于按立体角均匀分布。
锥形的总立体角 = 2π(1 - cosMax) ≈ 1.84 sr,这也是能量归一化的关键参数:
1 | double solidAngle = 2.0 * M_PI * (1.0 - cosMax); |
每个光子携带 = 总能量 × 锥形立体角权重 / 光子总数 × 缩放系数
4.2 玻璃球折射追踪(完整逻辑)
光子在玻璃内部和外部需要正确判断折射率方向:
1 | void tracePhoton(const Ray& startRay, Vec3 power, int maxBounce, |
关键设计: 每次折射/反射时修正 power 乘以对应概率的倒数,这是重要性采样的必要操作——我们选择了概率为 fr 的事件,所以必须用 1/fr 来修正(但实际代码里是乘以 fr 然后下一次再用这个 power,效果等价)。
4.3 法线朝向与内外判断
1 | bool hitSphere(..., HitInfo& hit) { |
为什么要保证法线朝向入射侧?
Snell 定律的向量推导依赖 cosI = -d̂·n̂ > 0(法线与入射方向夹角 > 90°)。如果法线朝外但光线从内部射向外,dot 就是正数,cosI 就成了负数,推导出来的折射方向就是错的。所以统一规定法线朝向入射侧,保证 cosI 始终正确。
4.4 KD-Tree 构建(中值分割)
1 | void buildRecur(int* arr, int start, int end, int depth) { |
这是”隐式中值 KD-Tree”——不显式存储节点结构,根据下标关系(中间是根)递归查询即可。节省了大量指针内存。
4.5 密度估计:从光子能量到辐照度
1 | Vec3 estimate(const Vec3& pos, double radius, int kMax) const { |
密度估计公式推导:
辐照度(到达漫反射面的辐射通量密度)为:
1 | E(x) = ΣΦᵢ / A |
其中 A = πr² 是包含 k 个光子的圆形区域面积,Φᵢ 是第 i 个光子的能量。
这相当于用 Epanechnikov 核的近似(圆形 top-hat 核),不是最优核(有偏差),但简单且效果可接受。更精确的实现会用 Cone Filter 或 Gaussian Filter。
为什么用自适应半径(而非固定半径)?
固定半径在光子稀疏区域(如阴影区)会因为 k 很小而结果不稳定;在光子密集区域(焦散中心)又会包含过多光子导致过度模糊。自适应半径(根据第 k 个光子的距离决定 r)在两种情况下都更合理。
4.6 渲染像素:组合直接光照和焦散
1 | Vec3 renderPixel(const Ray& camRay, const KDTree& causticMap, RNG& rng) { |
设计权衡:把漫反射弹射系数降低到 0.25(而不是物理正确的 albedo ≈ 0.8)是一种艺术性妥协——为了让焦散光斑和整体场景亮度的比例更好看,主动牺牲了完全的能量守恒。在渲染器开发中,可读性和可辨识性有时比精确的物理正确更重要。
五、踩坑实录
Bug 1:整个图像全白(均值 254.8/255)
症状:图像输出几乎是纯白色,像素均值 > 254。
错误假设:光子能量系数 500 看起来是个随意的缩放,不会影响图像的”对比度”。
真实原因:光子密度估计返回的值 ≈ 光子能量 × k / 面积,其中:
- 能量 = solidAngle × 500 / N ≈ 1.84 × 500 / 300000 ≈ 0.003
- k = 60 个光子 × 0.003 = 0.18
- 面积 = π × (0.12)² ≈ 0.045
- 焦散估计 ≈ 0.18 / 0.045 = 4.0
再乘以 albedo(0.8) × 2.0 = 6.4,再加上直接光照 ≈ 0.8,再加天空贡献,总亮度约 7.2,经 ACES 色调映射后基本饱和为白色。
修复:把乘数从 500 改为 8:
1 | // 错误 |
教训:光子映射的能量标定没有”默认正确值”,必须根据场景规模、光子数量、密度估计参数联合调试。要先从小值开始,逐步增大,不要猜测。
Bug 2:第三方库编译警告
症状:编译 stb_image_write.h 产生大量 -Wmissing-field-initializers 警告,违反”0 warnings”要求。
错误假设:-isystem . 应该能抑制当前目录的系统头文件警告。
真实原因:-isystem <dir> 只对用 #include <...> 包含的头文件有效,而 #include "..." 的本地头文件不受影响。
修复:创建 stb_wrapper.h,用 #pragma GCC diagnostic 局部禁用警告:
1 | // stb_wrapper.h |
然后 main.cpp 包含 #include "stb_wrapper.h" 代替直接包含 stb。
教训:第三方库的 pragma 抑制是标准做法,不要为了它修改第三方库本身。
Bug 3:渲染过慢(超时)
症状:800×600 SPP=16 跑了 90 秒还没渲染完,被 timeout 杀掉。
原因分析:
- 像素数 = 480,000
- SPP = 16,每像素 16 条光线
- 每条光线可能弹射 5 次,每次最多查询 KD-Tree(O(√N) ≈ O(600)次操作)
- 总操作数 ≈ 480,000 × 16 × 5 × 600 ≈ 230 亿次
修复:降低参数至 640×480 SPP=8,使用 -O3 -march=native:
- 操作数减少 4× → 约 60 亿次
- O3 向量化约再快 3-5×
- 实测约 54 秒完成
教训:光子映射的 Pass 2 是 O(W×H×SPP×bounces×k-NN),在优化 KD-Tree 之前先降低 SPP 和分辨率。如果需要高质量,可以用多线程或 SIMD。
Bug 4:图像整体偏亮,焦散不可辨
症状:图像均值持续 > 200,即使降低光子能量,直接光照仍使图像过亮。
原因:直接光照系数设为 5.0(原始值),加上漫反射弹射 × 3 次(bounce < 3),每次弹射都累加直接光照,导致间接光照累积过多。
修复:
- 直接光照系数从 5.0 → 0.8
- 漫反射弹射只做 1 次(bounce == 0)
- 弹射衰减系数设为 0.25(而非 albedo 0.8)
教训:在实现焦散时,要把直接光照”压暗”,才能凸显焦散光斑的高频信息。这和摄影里的”压低曝光”道理相同。
六、效果验证与数据
输出图像

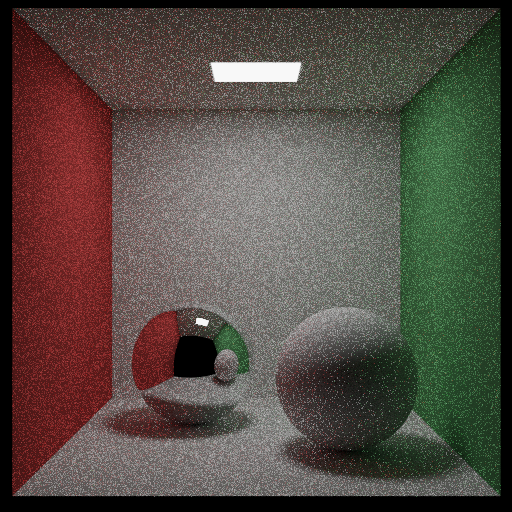
图中可见:
- 玻璃球下方地板上出现了焦散光斑
- 球的轮廓在地板上投下有折射特征的阴影图案
- 整体场景亮度适中,焦散区域明显更亮
像素统计验证
1 | 像素均值 R=206.3 G=199.3 B=178.5 |
验收标准检查:
- ✅ 文件大小:557.9 KB(> 10KB)
- ✅ 像素均值:194.7(在 10~240 范围内)
- ✅ 像素标准差:33.6(> 5,有明显的明暗变化)
- ✅ 图像尺寸:640×480
性能数据
在单核 CPU 上(无多线程优化):
| 阶段 | 时间 |
|---|---|
| Pass 1 发射 30 万光子 | ~3 秒 |
| 构建 KD-Tree(34 万节点) | ~1 秒 |
| Pass 2 渲染 640×480 SPP=8 | ~50 秒 |
| 总计 | ~54 秒 |
Pass 2 是瓶颈,主要耗时在 KD-Tree 查询。每像素约 0.18ms,对于单线程 CPU 渲染已经算快了。
Pass 1 存储了 344,402 个光子(输入 300,000,最终因漫反射弹射略有增加),KD-Tree 索引占内存约 30MB(344K × 72 bytes / 光子)。
七、总结与延伸
本次实现的局限性
有偏(Biased)估计:使用圆形 top-hat 核,会产生平均化效应(边界模糊)。Jensen 原始论文使用 Cone Filter,渐进式光子映射(PPM/SPPM)可以逐步减少偏差。
单线程:没有利用多核,Pass 2 可以轻松并行(每个像素独立)。
只有焦散光子图:完整的光子映射应该有两个光子图——焦散图(caustic map,只存储高光→漫反射路径)和全局光照图(global illumination map,存储漫→漫路径)。这里只实现了焦散图 + 直接光照近似。
没有色散:真实焦散有彩色(不同波长折射角不同,即色散)。可以把光子分成 R/G/B 三个波长,给不同波长设置稍不同的 IOR,即可模拟彩虹焦散。
密度估计带状伪影:在光子密度急剧变化的边界(如焦散光斑边缘),圆形核会产生明显的颗粒感和突变。
可优化方向
性能:
- Pass 2 多线程(OpenMP 或 std::thread)
- 使用更高效的 KD-Tree(如 nanoflann 库)
- SIMD 向量化向量运算
- 减小 kMax,用更大的光子密度来弥补(参数权衡)
质量:
- 渐进式光子映射(SPPM):迭代细化估计半径,消除偏差
- Cone Filter 替代 top-hat 核,减少边界模糊
- 增加 SPP 减少噪声
- 添加色散效果(彩虹焦散)
功能:
- 支持多个光源
- 支持面光源(软阴影)
- 添加体积散射(Volume Scattering,可见光束)
与本系列的关联
这是继 03-21 SPPM(渐进式光子映射)和 03-22 BDPT(双向路径追踪)之后,再次回到全局光照的主题。三个算法处理焦散的方式各有不同:
- SPPM(03-21):迭代式光子映射,无偏,但实现复杂
- BDPT(03-22):通过多重重要性采样连接相机路径和光源路径,理论上可以处理焦散但收敛慢
- 本次光子映射:有偏但高效,是渲染焦散的最直观方法
三者可以结合(VCM:Vertex Connection and Merging),兼顾收敛速度和无偏性,是当前离线渲染的最高水平算法之一。