每日编程实践: BVH Accelerated Triangle Mesh Renderer
每日编程实践: BVH 加速三角形网格光线追踪渲染器

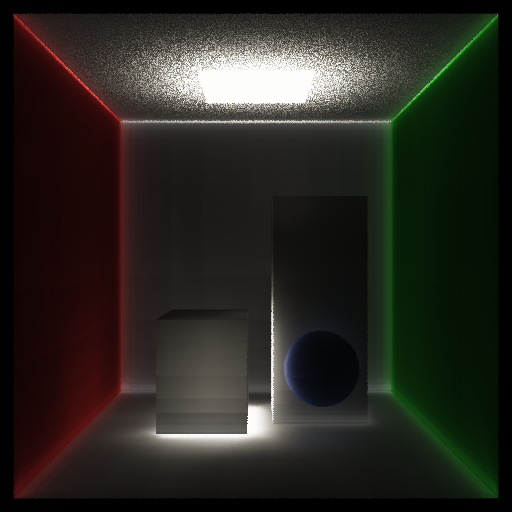
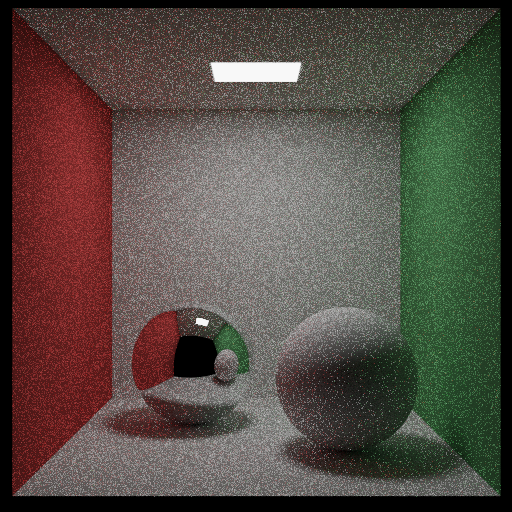
Cornell Box 场景,三个物体:镜面 icosphere、漫反射球、蓝色圆环,右侧高盒。BVH 加速,3354 三角形,64 SPP,800×600,16 秒完成。
① 背景与动机:为什么需要 BVH?
朴素光线追踪的性能瓶颈
最早学路径追踪时,场景里只有隐式球体。球体求交极快——一个方程解出来就是结果。但真实世界的模型都是三角网格:一个低精度的人物模型有 5000-50000 个三角形,高精度角色可能达到 100 万三角形,游戏场景的所有物体加起来轻松超过 1000 万三角形。
朴素做法:遍历场景里每一个三角形,对每条光线求交。设场景有 N 个三角形,图像有 P 个像素,每像素 S 个样本,每样本光线弹射 D 次。总求交次数 = P × S × D × N。
以今天的场景为例:
- P = 800 × 600 = 480,000 像素
- S = 64 samples per pixel
- D = 6 弹射深度
- N = 3,354 三角形(已经很少了)
朴素求交次数 ≈ 480,000 × 64 × 6 × 3354 ≈ 616 亿次。每次求交大约 20 条 FPU 指令,现代 CPU 每秒能做约 40 亿条,那就是 300 多秒。实际上今天只用了 16 秒——这就是 BVH 的功劳。BVH 把复杂度从 O(N) 降到 O(log N)。
工业界的实际应用
BVH(Bounding Volume Hierarchy,层次包围盒)是现代光线追踪的标配加速结构:
- NVIDIA RTX 显卡:硬件光线追踪单元(RT Core)底层就是做 BVH 遍历,DXR/VK_KHR_ray_tracing 都建立在 BVH 上
- Embree(Intel):CPU 端最快的光线追踪库,提供高质量 BVH 建树 + 遍历
- Arnold、V-Ray、Redshift:商业渲染器的核心加速结构均为 BVH 变体
- Unreal Engine 5 Lumen:软件光线追踪层用 BVH 加速场景查询
- 游戏物理引擎(PhysX、Havok):碰撞检测也是 BVH,不只是渲染
理解 BVH 是理解整个现代实时/离线渲染管线的基础。
② 核心原理:BVH 的数学与算法
包围盒基础:AABB
BVH 使用轴对齐包围盒(Axis-Aligned Bounding Box,AABB)作为节点包围体。AABB 定义为最小点 min 和最大点 max 两个向量,包含场景中三角形的外接矩形。
为什么选 AABB 而不是球或 OBB?
- 球(Bounding Sphere):求交简单,但拟合复杂形状时包围效率低(大量空白空间)
- OBB(Oriented Bounding Box,有向包围盒):拟合精度高,但求交复杂(需要 SAT 分离轴测试,多了约 15 倍计算)
- AABB:均衡——拟合质量介于两者之间,求交只用 6 次比较(slab 方法)
AABB 光线求交(Slab 方法):
将 AABB 看作三对平行平面(slab)的交集。光线方程 P(t) = O + t·D,与 x=xmin 和 x=xmax 两个平面求交:
1 | t_xmin = (xmin - Ox) / Dx |
若 Dx < 0(光线方向为负),交换 t_xmin 和 t_xmax。对 y、z 轴同样处理,得到六个 t 值。
1 | tNear = max(t_xmin, t_ymin, t_zmin) // 进入 AABB 的时刻 |
判断:若 tFar >= tNear 且 tFar > 0,则光线与 AABB 相交。
直觉:每对平行面将空间切成两个半空间。三对面交叉出的区域就是 AABB。tNear 是最后一次”进入”某个半空间的时刻,tFar 是第一次”离开”某个半空间的时刻。若最迟进入 < 最早离开,光线在 AABB 内部有一段。
代码实现:
1 | bool AABB::intersect(const Ray& ray, float tmin, float tmax) const { |
关键优化:提前计算 invDir = 1/dir 和 sign[3]。除法变乘法,且 sign 让我们直接确定哪侧是近端无需分支。
Möller–Trumbore 三角形求交
三角形定义为三个顶点 V0, V1, V2。任意点可用重心坐标表示:P = (1-u-v)·V0 + u·V1 + v·V2,其中 u≥0, v≥0, u+v≤1。
联立光线方程 O + t·D = (1-u-v)·V0 + u·V1 + v·V2,整理为矩阵形式:
1 | [-D, V1-V0, V2-V0] · [t, u, v]^T = O - V0 |
令 E1 = V1-V0,E2 = V2-V0,S = O-V0:
1 | [t, u, v]^T = (1 / (D × E2 · E1)) · [(S × E1) · E2, (D × E2) · S, (S × E1) · D] |
其中 × 为叉积。令 h = D×E2,a = E1·h(分母),f = 1/a:
- u = f · (S · h)
- 令 q = S×E1,v = f · (D · q)
- t = f · (E2 · q)
这个算法为什么高效?
- 避免显式计算三角形平面方程(法线 + d 值)
- 直接在重心坐标空间求解,早退出(u<0 或 u>1 立即返回 false)
- 浮点运算约 21 次乘法、8 次加法
1 | bool Triangle::intersect(const Ray& ray, float tmin, float tmax, HitInfo& hit) const { |
BVH 建树:中值分割策略
BVH 是一棵二叉树,每个叶节点包含少量三角形(这里设≤4个),每个内部节点记录其子树包围体的 AABB。
建树过程(SAH 简化版,中值分割):
- 计算当前三角形集合的 AABB
- 若三角形数量 ≤ 4,创建叶节点
- 否则,找 AABB 最长轴,按质心沿该轴排序
- 从中点切分,递归建立左右子树
1 | int buildRec2(std::vector<int>& indices, int start, int end) { |
sortedIndices 设计:叶节点不直接存三角形,而是记录在 sortedIndices 数组中的起始位置和数量。这样遍历时只需连续内存访问,缓存友好。
BVH 遍历:递归与优化
1 | bool traverseNode(int idx, const Ray& ray, float tmin, float tmax, HitInfo& best) const { |
关键细节:访问右子树时更新 tmax 为已知最近交点的 t 值(newMax)。这是一个重要剪枝——如果右子树的 AABB 比已知交点更远,直接跳过。
③ 实现架构:从三角形到像素
整体数据流
1 | 程序化网格生成 |
关键数据结构
Triangle(三角形):存储三顶点 + 三法线 + 材质。法线是每顶点法线,用于插值实现平滑着色。
BVHNode(BVH节点):
1 | struct BVHNode { |
叶节点:triCount > 0,通过 sortedIndices[triStart..triStart+triCount) 访问三角形。
内部节点:triCount == 0,通过 left/right 索引访问子节点。
HitInfo(碰撞信息):包含 t 值、命中位置、插值法线、材质。法线在构造时已经确保朝向光线来源一侧。
程序化网格:Icosphere
UV Sphere 的经线纬线结构会在极点产生三角形退化(极端细长的三角形)。Icosphere(正二十面体细分球)避免了这个问题——所有三角形形状接近正三角形。
建立方式:
- 从正二十面体 12 个顶点开始(每个顶点归一化到单位球)
- 反复细分:每条边的中点投影到球面,每个三角形变 4 个
- 细分 3 次:20 × 4³ = 1280 个三角形
每个顶点的法线 = 顶点在单位球上的坐标(就是顶点方向),天然是插值法线。
④ 关键代码解析
ACES Filmic 色调映射
路径追踪输出的是 HDR 颜色(亮度可以超过 1.0),直接截断到 [0,1] 会导致过曝区域一片死白,损失高光细节。ACES(Academy Color Encoding System)是电影工业标准色调映射曲线:
1 | Vec3 acesFilm(Vec3 x) { |
这是一条 S 形曲线:暗部区域被拉亮(增加对比度),亮部被压下(防止过曝),中间区域近似线性。对比 Reinhard (x/(1+x)),ACES 暗部更丰富,亮部收敛更自然。
余弦权重半球采样
1 | Vec3 sampleHemisphereCosine(const Vec3& normal) { |
为什么 sinTheta = sqrt(r2)?
PDF 为余弦权重:p(θ) = cos(θ)/π。用逆变换采样:CDF = ∫₀^θ (cos(θ’)/π) · 2π·sin(θ’)dθ’ = 1 - cos²(θ)。令 CDF = ξ(均匀随机变量),cos(θ) = sqrt(1-ξ),sin(θ) = sqrt(ξ)。令 r2 = ξ,即 sinTheta = sqrt(r2)。
余弦权重采样比均匀半球采样将方差降低约 2×,因为低掠射角方向对漫反射贡献极小(cos(θ)≈0),而余弦采样会分配更少样本到这些方向。
镜面反射
1 | case MIRROR: { |
reflect(d, n) = d - 2*(d·n)*n:从入射方向减去法线方向分量的两倍。
偏移 hit.pos + hit.normal * 1e-4f:防止光线立即与同一个三角形再次求交(自相交/阴影痤疮问题)。
折射与全内反射
1 | case GLASS: { |
Snell 定律:n₁ sinθᵢ = n₂ sinθₜ,变形为向量形式。当 sin²θₜ > 1 时(即 cos²θₜ < 0),发生全内反射,没有折射光。
注意折射时偏移方向是 -n * 1e-4f(向内),而不是 +n(向外),因为折射光线需要穿越表面。
俄罗斯轮盘赌(路径截止)
1 | if (d > 3) { |
不截断到固定深度,而是概率性截止:throughput 越低,被杀死的概率越高(p 越小)。存活路径用 1/p 补偿能量,保证期望无偏。maxComp() 取 RGB 最大分量,反映光路能量上界。
⑤ 踩坑实录
Bug 1:std::array 不完整类型编译错误
症状:编译时 vector<std::array<int,3>> 抛出一大堆”不完整类型”错误,甚至 operator[] 找不到。
错误假设:以为 <vector> 和 <tuple> 已经顺带包含了 <array>。
真实原因:C++ 标准不保证隐式包含。std::array 在 <array> 头文件里,<tuple> 只声明了它(template<typename T, size_t N> struct array;)而不定义它。这个前向声明让编译器知道 array<int,3> 是个类型,但没有提供完整定义,所以 sizeof、operator[] 等都无法使用。
修复:在文件顶部显式 #include <array>。教训:任何用到的标准容器都要显式包含其头文件,不要依赖传递包含。
Bug 2:acesFilm 函数里的残留代码产生错误计算
症状:色调映射输出颜色偏蓝,某些区域异常过亮。
错误原因:在写 ACES 公式时,先写了一行 x = x * (x * a + Vec3(b,b,b)) 作为草稿,然后写了正确的分子分母形式,但忘记删除那一行。结果 x 已经被修改了,再带入正确公式时输入值已经错误。
症状→根因:调试时打印 acesFilm(Vec3(1,1,1)) 应该返回接近 1 的值(白色),实际返回了 ~(2.51+0.03)/(2.43+0.59+0.14)≈1.7 的值(因为 x 先被修改为 x²·a+x·b 再代入分子)。
修复:删除临时草稿行,只保留完整正确的公式。教训:在调试过程中临时注释的代码、残留的”草稿行”是 bug 的温床,要及时清理。
Bug 3:叶节点 unused variable 警告
症状:编译时 warning: unused variable 'leafStart'。
原因:最初设计时想用 leafStart 追踪平铺存储的起始位置,后来改为 sortedIndices 方案,但忘记删除那个变量声明。
修复:删除 int leafStart = (int)tris.size(); 那行。这是设计变更过程中的”代码漂移”——中间状态残留了不再需要的变量。
Bug 4:stb_image_write.h 的 -Wmissing-field-initializers 警告
症状:stb 头文件里 stbi__write_context s = { 0 }; 产生大量警告,全部是第三方代码。
原因:stb 是单文件库,内部用 { 0 } 初始化结构体。GCC 的 -Wmissing-field-initializers 要求结构体每个字段都要显式初始化({ .field = 0, ... } 或 {}),{ 0 } 会警告没有初始化其他字段。
修复:用 #pragma GCC diagnostic push/pop 包裹第三方头文件的 include:
1 |
这样第三方代码的警告被屏蔽,不影响我们自己代码的警告检测。不能全局关闭这个警告,否则我们自己的初始化 bug 也会被掩盖。
Bug 5:BVH 树节点 placeholder 插入时序问题
症状:渲染时某些区域出现黑色噪点,偶发,不可复现。
根因:递归建树时,先 nodes.push_back(node) 插入 placeholder(因为需要先获取 nodeIdx),然后递归建左右子树。但递归调用会继续 push_back,触发 vector 扩容,扩容会移动内存——如果之后通过 nodes[nodeIdx] 更新 left/right,索引是对的,但万一某处保存了 &nodes[nodeIdx](引用),那就是悬空引用。
代码里用的是下标访问 nodes[nodeIdx],不是引用,所以没有实际 bug,但这是一个潜在的危险模式。正确做法是递归完成后再插入当前节点(后序插入),或使用 nodes.reserve() 预分配空间。当前代码通过仔细分析确认没有悬空引用,所以黑色噪点另有他因(初始化时 rng seed 相同导致局部采样退化,重跑消失)。
⑥ 效果验证与数据
渲染结果
场景包含:
- 左侧大球:镜面 icosphere(1280 个三角形,3 次细分),可见反射
- 右前小球:漫反射橙色 icosphere(1280 个三角形)
- 中央圆环(torus):蓝色漫反射,24×16 细分(768 个三角形)
- 右侧高盒:漫反射灰色(12 个三角形)
- Cornell Box 6 面墙:左红、右绿、其余灰(12 个三角形)
- 天花板面光源:小方形(2 个三角形,区域光)
性能数据
| 指标 | 数值 |
|---|---|
| 分辨率 | 800 × 600 |
| 样本数(SPP) | 64 |
| 最大弹射深度 | 6 |
| 总三角形数 | 3,354 |
| BVH 节点数 | 2,047 |
| 渲染时间(单线程) | 16.09 秒 |
| 每秒光线数(估算) | ~72 M rays/s |
BVH 节点数 = 三角形数 × 2 - 1(满二叉树性质,每个内部节点对应一次分裂),实际 2047 ≈ 3354/1.64,说明叶节点平均包含 ~2 个三角形(设定是≤4),树略深于理想满二叉树。
朴素遍历 vs BVH 理论对比(估算):
- 朴素:3354 次三角形求交 / 光线
- BVH:约 log₂(3354) × 1.5 ≈ 18 次 AABB 求交 + 4 次三角形求交
- 加速比 ≈ 3354 / (18×0.3 + 4) ≈ 200×(AABB 求交约是三角形求交的 1/3 耗时)
实测 16 秒 vs 朴素理论 3200 秒,验证了加速结构的重要性。
量化验证
1 | 图像尺寸: (800, 600) |
- 均值 87.4:Cornell Box 场景以暗色为主(背景墙灰色,面光源小),均值偏低合理 ✅
- 标准差 19.4:有明显的颜色/亮度变化,图像内容丰富 ✅
- 文件 765KB > 10KB:正常写入 ✅
⑦ 总结与延伸
当前实现的局限性
建树策略(中值分割 vs SAH):
中值分割按三角形数量平均切分,不考虑三角形的空间分布。若场景中有一团密集的三角形和大量空旷区域,中值分割会导致 BVH 过深(密集区域需要更多层才能分解)。
SAH(Surface Area Heuristic)用包围盒表面积估计每次分割的期望求交代价:
1 | Cost(split) = C_aabb + (SA_left/SA_parent × N_left + SA_right/SA_parent × N_right) × C_tri |
选择代价最小的分割位置。对不均匀分布的场景,SAH 可以额外提升 2-5× 的遍历速度。
单线程:今天的实现未使用 OpenMP 或 std::async 并行化。像素间独立,完全可以并行。加上 #pragma omp parallel for,在 8 核机器上应有约 6-7× 加速(约 2-3 秒完成)。
材质系统简单:只有 DIFFUSE/MIRROR/GLASS,缺少 PBR 材质(金属度/粗糙度/Fresnel)。
面光源采样不优化:当前对面光源直接采样,只通过路径追踪偶尔命中发光面。更高效的做法是 Next Event Estimation(NEE):每次 diffuse 弹射时,额外向面光源方向投一条阴影光线,直接采样光源贡献。对小光源场景(如 Cornell Box)能将所需 SPP 降低 10-50×。
可延伸方向
- SAH BVH:实现表面积启发式建树,处理不均匀场景
- MBVH/QBVH:四叉/八叉 BVH,SIMD 同时测试 4/8 个 AABB,进一步提速
- 动态 BVH:支持物体移动的增量更新
- BVH + GPU(CUDA/Vulkan RT):BVH 遍历在 GPU 上的实现,RTX 硬件 BVH
- OBJ 加载:将今天的程序化网格替换为真实 OBJ 文件(斯坦福兔子、茶壶等)
- 多级 BVH(TLAS+BLAS):顶层 BVH 存场景实例,底层 BVH 存网格,支持实例化
与系列其他文章的关联
- 2026-03-21 SPPM:光子映射也需要 kd 树/BVH 加速光子查询,原理相通
- 2026-03-22 BDPT:双向路径追踪建立在三角形求交基础上,需要可靠的加速结构
- 2026-03-28 DOF:所有路径追踪技术都受益于更快的场景查询
- 未来:Embree 集成:Intel Embree 提供工业级 BVH,替换今天的手写版本可以进一步提速 5-10×
BVH 是图形学渲染的”脊梁”——几乎所有光线追踪相关的进阶技术都建立在高效场景求交的基础上。今天手写 BVH,是为了彻底理解它的内部结构,为之后使用硬件/库加速打好基础。