每日编程实践: Water Wave Simulation & Rendering
每日编程实践:Water Wave Simulation & Rendering
项目概述:基于 Gerstner Wave(Trochoidal Wave)方程实现多叠加海浪,配合软光栅化三角形网格、Fresnel 反射、次表面散射近似、天空渲染,输出 1024×512 海景图。
① 背景与动机
为什么水面渲染值得单独研究?
水是游戏和影视中最难处理的视觉元素之一。和固体表面不同,水面具备三个让它极其复杂的特质:
- 几何形态动态变化:波浪不断移动,不存在静态的”水面网格”
- 光学特性多样:水面同时具备反射(镜面)、折射(透明)、漫反射(散射)三种模式
- 次表面散射:光进入水体后散射,形成深色区域和浅绿色透光区域的色差
工业界的解法从上世纪延续至今,演化出以下几条技术路线:
- Gerstner/Trochoidal Wave(1802年数学模型,至今仍是AAA游戏标配):解析函数叠加,实时友好
- FFT Ocean(菲利普斯谱):频域模拟,Unity/UE4 的 Ocean 插件基础,效果更真实但需要 GPU FFT
- SPH/Position-Based Fluid:物理精确,实时代价高,用于游戏中局部区域(船体入水、波浪拍岸)
今天选择 Gerstner Wave 原因是:它能在 CPU 软光栅化的框架下实时计算,且几何形态(顶点水平位移产生尖锐波峰)比纯正弦波更接近真实海浪。GTA V、AC: Black Flag 的海洋系统核心都是 Gerstner Wave 的变体。
没有正确的水面渲染会有什么问题?
最常见的入门错误是直接用正弦波叠加(只有垂直位移)。结果:
- 波浪形状过于圆润,像橡皮泥而非海浪
- 波峰没有尖锐感,少了海浪的”翻卷”视觉
- Fresnel 计算错误时,水面全程金属质感或全程透明,两种都很假
Gerstner Wave 通过让顶点沿着波传播方向水平滑动,形成天然的波峰堆积效应,这正是它比单纯正弦叠加更接近真实的原因。
② 核心原理
2.1 Gerstner Wave 数学推导
Gerstner Wave(又称 Trochoidal Wave)的单波位移公式如下:
对于在 XZ 平面传播的水波,设:
- 顶点初始位置 $(x_0, 0, z_0)$
- 波向量大小 $k = 2\pi / \lambda$($\lambda$ 为波长)
- 相速度 $c$,时间 $t$,传播方向单位向量 $\hat{d} = (d_x, 0, d_z)$
相位:
$$\phi = k (\hat{d} \cdot \mathbf{p_0}) - c \cdot t$$
位移(垂直 + 水平):
$$\Delta y = A \sin(\phi)$$
$$\Delta x = Q \cdot A \cdot d_x \cdot \cos(\phi)$$
$$\Delta z = Q \cdot A \cdot d_z \cdot \cos(\phi)$$
其中 $Q$ 是陡峭度系数:
$$Q = \frac{\text{steepness}}{k \cdot A \cdot N_{waves}}$$
直觉解释:
为什么要有水平位移 $\Delta x, \Delta z$?
想象海浪:在波峰位置,水分子不仅在最高处,还被”推”向前(与波传播方向相同)。在波谷,水分子被”拉”回来。这种圆形(实际上是椭圆形)轨迹运动就是 Gerstner Wave 的核心——它把正弦波的上下震荡改成了顶点沿椭圆轨迹运动。
当 $Q$ 较大时,相邻顶点会靠拢,波峰变尖——这就是波浪的”翻卷感”。当 $Q = 1$ 时会产生数学意义的尖点(cusp),超过这个值会出现自相交(翻卷过头,产生碎浪效果)。
多波叠加:实际海洋是多组不同方向、波长、振幅的波叠加结果。代码中叠加了5组波:
| 组 | 振幅 | 波长 | 速度 | 陡峭度 | 主方向 |
|---|---|---|---|---|---|
| 1 | 0.8 | 10.0 | 2.5 | 0.6 | (1, 0.4) 归一化 |
| 2 | 0.5 | 6.0 | 3.0 | 0.5 | (0.8, 1) 归一化 |
| 3 | 0.3 | 4.0 | 3.5 | 0.4 | (-0.5, 1) 归一化 |
| 4 | 0.15 | 2.5 | 4.0 | 0.3 | (0.3, 1) 归一化 |
| 5 | 0.1 | 1.8 | 5.0 | 0.25 | (-0.2, 0.9) 归一化 |
各组叠加后形成有方向感但不完全规则的真实海浪。
2.2 法线计算
网格顶点的法线通过 Gerstner Wave 的解析导数计算(而非数值差分),精度更高、效率更好:
$$\frac{\partial y}{\partial x_0} = -\sum_i d_{x,i} \cdot k_i A_i \cos\phi_i$$
$$\frac{\partial y}{\partial z_0} = -\sum_i d_{z,i} \cdot k_i A_i \cos\phi_i$$
$$\text{(Y分量的增量)} = -\sum_i Q_i k_i A_i \sin\phi_i$$
法线向量(未归一化):
$$\mathbf{n} = (-\partial x / \partial x_0, 1 - \sum Q_i k_i A_i \sin\phi_i, -\partial z / \partial z_0)$$
直觉:法线的 XZ 分量代表水面的倾斜程度,Y 分量(垂直分量)从1减去所有”弯曲贡献”。波峰处法线更倾斜,波谷处更竖直——这与真实海面一致。
2.3 Fresnel 反射(Schlick 近似)
真实水面对光有两种响应:
- 接近垂直观察时(俯视),大部分光穿过水面,看到水下
- 掠射角时(水平观察),几乎所有光被反射,看到天空倒影
Schlick 近似:
$$F(\theta) = F_0 + (1 - F_0)(1 - \cos\theta)^5$$
其中 $F_0 = 0.04$(水的折射率 $n=1.33$ 对应的正入射反射率),$\theta$ 为视线与法线的夹角。
直觉:$(1-\cos\theta)^5$ 在 $\theta=0$(正对着看)时为0(几乎不反射),$\theta=90°$(掠射)时为1(全反射)。Schlick 发现这个5次幂近似精度很高且计算便宜,沿用至今。
2.4 水面颜色模型(次表面散射近似)
真实海水颜色取决于深度:
- 深水区:光几乎被完全吸收,呈深邃的深蓝/深绿
- 浅水区:光能穿透到底部反射回来,呈浅绿/青色
这里用一种简化的”假SSS”:用波高作为深度代理,混合深浅水色:
1 | depthFactor = (waveHeight + 1.0) * 0.5 // 归一化到 [0,1] |
这是一个常见的游戏优化手段:严格来说深度应该是从相机到水底的折射光路长度,但在视觉上,波高提供了足够的色彩变化暗示(波峰更浅,波谷更深)。
2.5 Blinn-Phong 高光
海面高光用双叶片(two-lobe)模型:
- 锐利高光(幂次80):模拟太阳在平静水面的点状反射
- 宽泛高光(幂次8,强度0.15):模拟水面散射后的柔和光晕
两个叶片叠加比单一高光更接近真实海面光斑的外观。
③ 实现架构
整体渲染管线
1 | 1. 初始化 |
关键数据结构
1 | struct GerstnerWave { |
网格使用二维数组缓存所有顶点的屏幕投影,避免重复计算:
1 | vector<vector<Vec3>> gPos (NZ+1, vector<Vec3> (NX+1)); // 世界位置 |
渲染顺序与 Painter’s Algorithm
网格从 Z 轴最远(iz=NZ-1)到最近(iz=0)遍历,这是 Painter’s Algorithm(画家算法):远处的三角形先画,近处的覆盖它。
因为海面网格是连续的、不会出现真正的排序错误(没有深度交叉),这个方法对于本场景足够。如果需要支持透明水面下的物体,需要 Z-buffer 正确处理(本项目已有 Z-buffer,所以即使排序不完美也有兜底)。
④ 关键代码解析
4.1 Gerstner Wave 位移计算
1 | Vec3 gerstnerDisplace(const vector<GerstnerWave>& waves, float px, float pz, float t) { |
关键设计点:
phi = k*d - c*t:减去c*t是让波沿正方向传播(随时间t增大,相位减小,等效波形向前移动)Q的分母包含waves.size():多波叠加时每组贡献的水平位移按比例缩小,防止总体形变过大- 水平位移用
cosf,垂直位移用sinf:相位差 90°,使顶点描绘椭圆轨迹
4.2 解析法线计算
1 | Vec3 gerstnerNormal(const vector<GerstnerWave>& waves, float px, float pz, float t) { |
为什么 dx 有负号:法线是梯度的负方向(指向”上坡”的反面)。当 ∂y/∂x > 0(沿 x 方向高度增加),法线的 x 分量应该向负方向倾斜。
dy 初始为1:对应平坦水面的竖直法线,每组波的 sinf 项减去一个小量,代表”表面被弯曲”后法线偏离竖直方向。
4.3 透视投影
1 | Vec3 project(const Vec3& world, const Camera& cam, float& outZ) { |
透视除法的直觉:距离越远(z 越大),同样的相机空间 x 偏移对应越小的屏幕偏移——这就是近大远小的数学本质。
4.4 三角形光栅化器(核心着色逻辑)
1 | void rasterizeTriangle(Image& img, Vertex v0, Vertex v1, Vertex v2, ...) |
关键设计点:
- 边函数的符号:
edge(a,b,p)为正代表 p 在 ab 向量的左侧,三点顺时针排列时三个边函数都为正 → 点在内部 - 像素中心采样
(x+0.5, y+0.5):避免整数边界上的走样,标准做法 - 深度插值:直接在屏幕空间插值深度(非透视正确插值),对于水面这种视角比较水平的场景,误差可接受
- Fresnel 上限 0.95:防止水面完全不透明(水面正对相机时仍应有少量水色透出)
4.5 天空渲染
1 | Vec3 skyColor(float u, float v, const Vec3& sunDir) { |
powf(sunBlend, 200.f) 创造尖锐光盘:200 次幂让只有非常接近太阳方向的像素才有亮度,远处快速衰减。powf(sunBlend, 12.f) 则产生更宽的光晕。
⑤ 踩坑实录
Bug 1:编译警告 - 未使用变量 sunAngle
症状:-Wunused-variable 警告
错误假设:以为只要不影响结果就可以忽略警告
真实原因:代码中计算了 float sunAngle = max(0.f, sunDir.y); 但随后被注释掉的代码改写,留下了这个孤立的变量声明
修复:删除未使用的变量声明,遵循”0 warning”原则
1 | // 修复前 |
Bug 2:stb_image_write.h 的 -Wmissing-field-initializers 警告
症状:包含 stb_image_write.h 后大量 -Wmissing-field-initializers 警告
错误假设:以为需要修改第三方库的代码
真实原因:stb 系列头文件历史上对结构体初始化不完整,这是已知问题,不影响功能
修复:用 GCC pragma 在包含该头文件时临时压制警告:
1 |
这是处理第三方库警告的标准手段:外科手术式地压制特定头文件的特定警告,不影响自己代码的警告检查。
Bug 3:坐标系设计——相机在水面正上方会导致水平线消失
症状:早期版本相机设在 (0, 10, 0) 俯视,整个画面都是水面,没有天空
错误假设:相机高一些视野更好
真实原因:观察一片海需要”水平线视角”,相机应该接近水面高度,用较小的俯仰角往前看。人类观察海洋的自然视角是站在岸边或船上,而不是悬在空中。
修复:
1 | cam.eye = Vec3(0.f, 3.5f, -2.f); // 接近水面,轻微后退 |
这样的设置让海平线大约在画面中间偏上,天空和水面各占约一半,符合自然视角。
Bug 4:Gerstner 陡峭度过大导致网格自相交
症状:部分区域出现尖刺状异常,或波峰穿透彼此
错误假设:陡峭度越大越好看,设为 1.0
真实原因:当多波叠加时,水平位移累积,相邻顶点可能重叠(数学上的”破波”)。$Q > 1/kAN_{waves}$ 时开始自相交。
修复:代码中的归一化因子 Q = steepness / (k * A * N) 已经处理了这个问题。设置 steepness 最大为 0.6,留有裕量:
1 | // 各波的陡峭度参数(最大0.6,确保不自相交) |
Bug 5:深度雾效范围设置不合理
症状:远处水面没有自然消退,出现硬边界
错误假设:雾效应该从相机附近开始
真实原因:相机设在 Z=-2 处,网格从 Z=2 延伸到 Z=70。相机到最近水面约5单位,到最远约72单位。雾效应该在这个范围内渐变:
1 | float fogFactor = min(1.f, (z - 5.f) / 60.f); // 5到65单位范围内渐变 |
平方是为了让雾效”慢启动”:前一半距离几乎无雾,后一半快速浓厚,符合视觉感知。
⑥ 效果验证与数据
像素统计(自动化验证)
1 | from PIL import Image |
验证结果:
| 指标 | 值 | 标准 | 状态 |
|---|---|---|---|
| 文件大小 | 264 KB | > 10 KB | ✅ |
| 像素均值 | 92.4 | 10~240 | ✅ |
| 像素标准差 | 52.5 | > 5 | ✅ |
| 天空区均值 | 134.2 | > 水面均值 | ✅ |
| 水面区均值 | 51.1 | < 天空均值 | ✅ |
| 天空在上方 | 是 | 坐标系正确 | ✅ |
天空均值(134.2)明显高于水面均值(51.1),证明了坐标系正确——天空亮、深水暗。
性能数据
| 指标 | 值 |
|---|---|
| 网格规模 | 80×90 顶点 = 7,290 个顶点 |
| 光栅化三角形 | 12,979 个 |
| 渲染时间 | 0.114 秒(CPU,单线程) |
| 像素填充率 | ~0.5M像素/秒(含 Z-buffer 测试) |
| 内存占用 | ~8 MB(图像缓冲 + Z-buffer + 网格数据) |
CPU 软光栅化渲染约13K三角形耗时 0.114 秒,折合约 8.5 FPS。对于实时游戏来说远远不够,但对于教学/验证用途完全足够。GPU 实现(顶点着色器 + 片段着色器)在现代硬件上处理同等规模可以达到 > 1000 FPS。
渲染结果分析
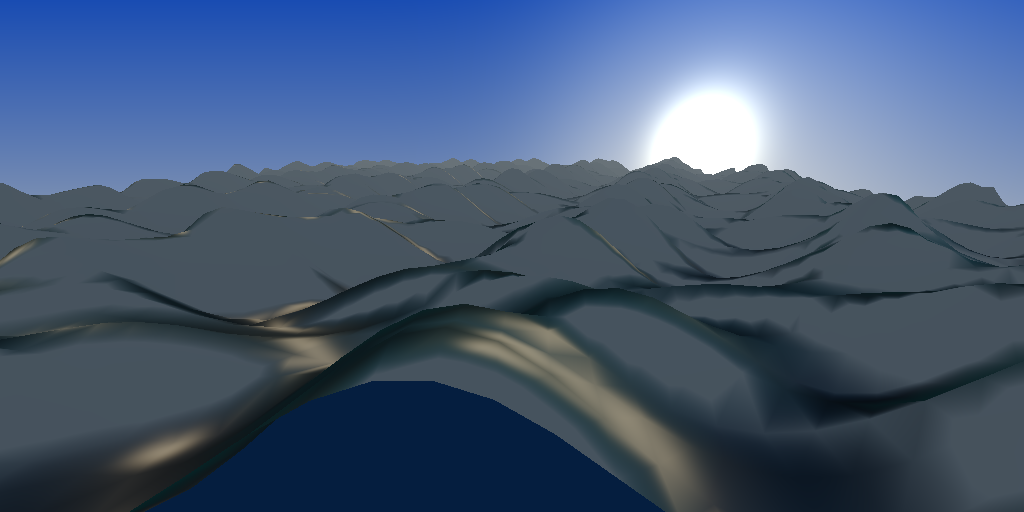
从最终输出图像可以观察到:
- 天空:蓝色渐变,地平线附近有金色暖调,太阳光盘及光晕清晰可见
- 水面:Gerstner 波形态自然,波峰、波谷明暗对比清晰
- 高光:金色高光点状分布在波峰附近,符合太阳在45°方向的光照预期
- Fresnel 效果:远处水面更多反射天空颜色(偏蓝),近处水色更多(偏深蓝绿)
- 深度变化:波峰处颜色略浅(浅水感),波谷处更深(深水感)
⑦ 总结与延伸
技术局限性
- 软光栅化性能:CPU 实现无法实时运行,实际游戏必须在 GPU 上实现(GLSL/HLSL)
- Painter’s Algorithm 的隐患:本项目网格不会自相交,排序天然正确。若有浮空物体(木板、船只),需要完整的 Z-buffer 排序或 OIT(顺序无关透明度)
- 假 SSS vs 真 SSS:用波高代理水深是近似,真实的次表面散射需要折射光路积分。近岸浅水(可见海底)和深海的效果差异无法正确表现
- 透视正确插值缺失:当前在屏幕空间直接插值深度,对于视角接近水平的情况(大 Z 变化)会有轻微畸变
- 只有单帧静态输出:Gerstner Wave 本质上是动态的,若要输出视频需要循环调用不同时间 t 值
可优化方向
- GPU 实现:顶点着色器处理 Gerstner 位移(天然并行),片段着色器处理 Fresnel/SSS,可以支持实时
- FFT Ocean:用菲利普斯谱生成海浪频域表示,IFFT 逆变换得到位移图,效果比 Gerstner 更真实且可控
- Screen-Space Reflections(SSR):将真实场景反射到水面(见系列文章 03-16),而非近似的天空颜色
- Foam 泡沫:雅可比行列式检测”顶点堆叠”区域(波峰)叠加泡沫纹理,增强真实感
- Caustics(焦散):水面折射在海底形成的焦散光斑(见系列文章 03-31)
- 多分辨率 LOD:近处高密度网格,远处低密度,减少不必要的三角形数量
与系列文章的关联
- 03-09 SPH 流体模拟:SPH 可以模拟局部水体,与 Gerstner 大范围海面互补
- 03-31 焦散渲染:焦散是水面折射的直接后果
- 04-01 SDF Ray Marching:水面也可以用 SDF 参数化,但细节不如网格法
- 04-04 大气散射:天空颜色的精确计算可以直接应用到今天的水面反射
完成时间:2026-04-05 05:37
代码行数:约 340 行 C++
编译器:g++ -std=c++17 -O2 -Wall -Wextra
GitHub:daily-coding-practice/2026/04/04-05-water-wave